A visszacsatolási konfiguráció az SMPS alkalmazás-tervezések előnyben részesített topológiája, főleg azért, mert garantálja a kimeneti DC teljes elkülönítését a bemenő hálózati váltakozó áramtól. További jellemzők: alacsony gyártási költségek, egyszerűbb tervezés és egyszerű megvalósítás. Az 50 wattnál alacsonyabb kimeneti specifikációt tartalmazó flyback-átalakítók alacsony áramú DCM-változatát szélesebb körben használják, mint a nagyobb nagyáramú társait.
Tanuljuk meg a részleteket átfogó magyarázattal a következő bekezdéseken keresztül:
Átfogó tervezési útmutató az off-line rögzített frekvenciájú DCM Flyback átalakítóhoz
Repülési üzemmódok: DCM és CCM
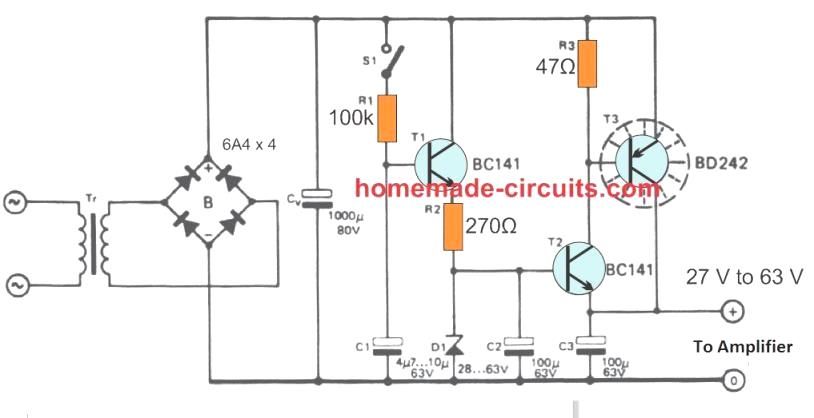
Az alábbiakban a flyback átalakító alapvető vázlatos kialakítását láthatjuk. Ennek a kivitelnek a fő szakaszai a transzformátor, a kapcsolási teljesítmény Q1 elsődleges oldalán, a híd egyenirányítója a D1 szekunder oldalon, a szűrőkondenzátor a simításhoz a D1 kimenete és egy PWM vezérlő fokozat, amely lehet egy IC által vezérelt áramkör.

Az ilyen típusú visszacsatolásos tervezésnek CCM (folyamatos vezetési mód) vagy DCM (folytonos vezetési mód) működése lehet a MOSFET T1 energiaellátásának konfigurálása alapján.
Alapvetõen DCM üzemmódban a transzformátorban tárolt teljes elektromos energiát a szekunder oldalon keresztül továbbítjuk, valahányszor a MOSFET kikapcsolódik kapcsolási ciklusai alatt (más néven repülési idõszak), ami ahhoz vezet, hogy az elsõdleges oldaláram nulla potenciált ér el mielőtt a T1 ismét bekapcsolhatna a következő kapcsolási ciklusban.
CCM üzemmódban az elsődlegesben tárolt elektromos energia nem kap lehetőséget arra, hogy teljes mértékben átterjedjen vagy indukálódjon a szekunderen.
Ennek az az oka, hogy a PWM vezérlő minden egyes későbbi kapcsolási impulzusa bekapcsolja a T1-et, mielőtt a transzformátor teljes tárolt energiáját átterjesztené a terhelésre. Ez azt jelenti, hogy a repülési áramnak (ILPK és ISEC) soha nem szabad elérni a nulla potenciált az egyes kapcsolási ciklusok alatt.
Az alábbi ábrán a két működési mód közötti különbségnek lehetünk tanúi a transzformátor elsődleges és szekunder szakaszán az áram hullámformáin keresztül.

Mind a DCM, mind a CCM módok megvannak a sajátos előnyeik, amelyeket a következő táblázat tanulhat meg:

A CCM-hez képest a DCM üzemmód áramköre nagyobb csúcsáramot igényel az optimális teljesítmény biztosítása érdekében a transzformátor szekunder oldalán. Ez viszont megköveteli, hogy az elsődleges oldalt nagyobb RMS áramerősséggel osztályozzák, vagyis a MOSFET-et a megadott magasabb tartományba kell besorolni.
Azokban az esetekben, amikor a kivitelt korlátozott bemeneti áram és alkatrészek tartományával kell megépíteni, akkor általában egy CCM módú visszaváltást választanak, amely lehetővé teszi, hogy a tervezés viszonylag kisebb szűrőkondenzátort alkalmazzon, és alacsonyabb vezetési veszteséget okozzon a MOSFET-en és a transzformátoron).
A CCM kedvezővé válik olyan körülmények között, ahol a bemeneti feszültség alacsonyabb, míg az áram nagyobb (több mint 6 amper). 50 wattos teljesítmény , kivéve az 5 V-os kimeneteket, ahol a teljesítményspektrum 50 wattnál alacsonyabb lehet.

A fenti kép jelzi a repülési módok elsődleges oldalán mért aktuális választ, valamint a háromszög és trapéz alakú hullámformák közötti megfelelő kapcsolatot.
A háromszög alakú hullámforma IA jelzi azt a minimális inicializálási pontot, amely nullának tekinthető a MOSFET bekapcsolási periódusának kezdetén, és egy magasabb áram csúcsszintet is, amely a primer tekercsben tartósan fennmarad. transzformátor abban az időben, amíg a MOSFET ismét bekapcsol, a CCM üzemmódban.
Az IB az aktuális nagyságrendű célpontnak tekinthető, míg a mosfet kapcsoló BE van kapcsolva (Ton intervallum).
Az IRMS normalizált áramérték a K tényező (IA / IB) függvényének tekinthető az Y tengely felett.
Ezt fel lehet használni szorzóként, amikor az ellenállási veszteségeket egy sor hullám alakra kell kiszámítani, egy trapéz alakú hullámformához viszonyítva, amelynek lapos felső hullámformája van.
Ez a transzformátor tekercsének és a tranzisztoroknak vagy diódáknak az áram hullámalak függvényében bekövetkező extra elkerülhetetlen egyenáramú vezetési veszteségeit is bemutatja. Ezeknek a tanácsoknak a felhasználásával a tervező képes lesz megakadályozni akár 10–15% -os vezetési veszteséget egy ilyen jól kiszámított átalakító kialakítással.
A fenti kritériumok figyelembevétele jelentősen elengedhetetlenné válhat a magas RMS-áramok kezelésére tervezett alkalmazások számára, és az optimális hatékonyságot követelik meg fő szempontként.
Lehetséges, hogy kiküszöböljük az extra rézveszteségeket, bár ez óriási szükséget igényelhet magméret a lényegesen nagyobb tekercselő ablak területének befogadására, ellentétben olyan helyzetekkel, ahol csak az alapvető specifikációk válnak döntő fontosságúvá.
Mint eddig megértettük, a DCM működési mód lehetővé teszi egy kisebb méretű transzformátor használatát, nagyobb átmeneti választ és minimális kapcsolási veszteséggel működik.
Ezért ez az üzemmód nagyon ajánlott a nagyobb kimeneti feszültségekhez és viszonylag alacsonyabb amperigényű repülési áramkörökhöz.
Bár lehetséges, hogy egy visszacsatoló átalakítót úgy lehet kialakítani, hogy az a DCM és a CCM módokkal is működjön, egy dolgot emlékeztetni kell arra, hogy a DCM és CCM mód közötti átmenet során ez a váltó funkció 2 pólusú műveletté alakul át, ami alacsony az átalakító impedanciája.
Ez a helyzet elengedhetetlenné teszi további tervezési stratégiák beépítését, beleértve a különféle hurok (visszacsatolás) és a meredekség kompenzálását a belső áramkörhöz képest. Gyakorlatilag ez azt jelenti, hogy meg kell győződnünk arról, hogy az átalakítót elsősorban CCM üzemmódra tervezték-e, ugyanakkor képes működni a DCM üzemmóddal, ha a kimeneten könnyebb terhelést használnak.
Érdekes lehet tudni, hogy a fejlett transzformátoros modellek használatával tisztább és könnyebb terhelésszabályozás, valamint a lépcsős résszélű transzformátor révén a teher széles tartományán belüli magas keresztszabályozással lehet javítani a CCM átalakítót.
Ilyen esetekben egy kis magrést kikényszerítenek egy külső elem, például szigetelőszalag vagy papír behelyezésével, annak érdekében, hogy kezdetben nagy induktivitást idézzen elő, és könnyebb terhelések mellett lehetővé tegye a CCM működését is. Ezt később részletesen megbeszéljük későbbi cikkeimmel.
Ilyen sokoldalú DCM módjellemzőkkel nem meglepő, hogy ez lesz a népszerű választás, amikor gondtalan, hatékony és alacsony fogyasztású SMPS-t kell kialakítani.
A következőkben lépésről lépésre megtanuljuk, hogyan kell megtervezni a DCM módú flyback átalakítót.
DCM Flyback tervezési egyenletek és szekvenciális döntési követelmények
1. lépés:
Értékelje és becsülje meg tervezési követelményeit. Összes SMPS tervezés a rendszer specifikációinak felmérésével és meghatározásával kell kezdeni. Meg kell határoznia és kiosztania a következő paramétereket:

Tudjuk, hogy a hatékonysági paraméter a legfontosabb, amelyről először dönteni kell, a legegyszerűbb módszer az, ha 75–80% körüli célt tűzünk ki, még akkor is, ha a tervezés olcsó. A kapcsolási frekvencia
Az Fsw-t általában veszélyeztetni kell, miközben a lehető legjobban kihasználja a transzformátor méretét és a kapcsolás, valamint az EMI miatt felmerülő veszteségeket. Ami azt jelenti, hogy el kell döntenie egy legalább 150 kHz alatti kapcsolási frekvenciát. Ez általában 50 kHz és 100 kHz közötti tartományban választható.
Továbbá, ha egynél több kimenetet kell beépíteni a tervezésbe, akkor a Pout maximális teljesítményértéket a két kimenet együttes értékeként kell beállítani.
Érdekes lehet, hogy a legutóbbi időkig a legnépszerűbb hagyományos SMPS mintákban volt a mosfet és a PWM kapcsoló vezérlő két különálló szakaszként, integrálva egy NYÁK-elrendezésre, de manapság a modern SMPS egységekben ez a két szakasz egy csomagba ágyazva található meg, és egyetlen IC-ként készül.
Főként azok a paraméterek, amelyeket általában figyelembe vesznek a flyback SMPS átalakító tervezése során: 1) az alkalmazás vagy a terhelés specifikációi, 2) költség 3) készenléti teljesítmény és 4) további védelmi funkciók.
Beágyazott IC-k használata esetén a dolgok általában sokkal könnyebbé válnak, mivel csak egy transzformátor és néhány külső passzív alkatrész kiszámítása szükséges az optimális repülési átalakító tervezéséhez.
Térjünk rá a flaback SMPS tervezéséhez szükséges számítások részleteire.
A bemeneti kondenzátor Cin és a bemenő DC feszültségtartomány kiszámítása
A bemeneti feszültségtől és a teljesítmény specifikációitól függően a Cin kiválasztásának alapszabálya, amelyet egyenáramú kapcsolati kondenzátornak is neveznek, a következő magyarázatokból tanulható:

A széles működési tartomány biztosítása érdekében wattonként 2uF vagy ennél nagyobb értéket lehet választani az egyenáramú összekötő kondenzátor számára, amely lehetővé teszi, hogy jó minőségi tartományt érjen el ehhez az alkatrészhez.
Ezután szükség lehet a minimális egyenáramú bemeneti feszültség meghatározására, amely a következő megoldással érhető el:

Ahol a kisülés az egyenáramú összekötő kondenzátor teljesítményarányává válik, ami nagyjából 0,2 körül lehet

A fenti ábrán vizualizálhatjuk az egyenáramú kapcsoló kondenzátor feszültségét. Amint látható, a bemeneti feszültség a maximális kimenő teljesítmény és a minimális bemenő váltóáramú feszültség alatt keletkezik, míg a maximális egyenáramú bemeneti feszültség a minimális bemeneti teljesítmény (terhelés hiányában) és a maximális bemenő váltakozó feszültség alatt keletkezik.
Terhelés nélküli állapotban láthatunk egy maximális egyenáramú bemeneti feszültséget, amely alatt a kondenzátor az AC bemeneti feszültség csúcsszintjén töltődik fel, és ezeket az értékeket a következő egyenlettel lehet kifejezni:

3. lépés:
A Flyback által indukált VR feszültség és a MOSFET VDS maximális feszültségfeszültségének értékelése. A Flyback által indukált VR feszültség alatt a transzformátor elsődleges oldalán át indukált feszültséget érthetjük, amikor a Q1 mosfet kikapcsolt állapotban van.
A fenti funkció viszont befolyásolja a mosfet maximális VDS-besorolását, amelyet a következő egyenlet megoldásával lehet megerősíteni és azonosítani:

Ahol Vspike a transzformátor szivárgásinduktivitása miatt keletkező feszültségcsúcs.
Először is, a VDSmax-ból 30% -os Vspike-ot lehet venni.
Az alábbi lista megmondja, hogy mekkora visszavert feszültség vagy indukált feszültség ajánlható egy 650–800 V névleges MOSFET-hez, és amelynek VR kezdeti határértéke 100 V-nál alacsonyabb a várható hatalmas bemeneti feszültségtartományban.

A megfelelő VR kiválasztása alku lehet a szekunder egyenirányító fölötti feszültségszint és az elsődleges mosfet specifikációk között.
Ha a VR-t a megnövelt fordulatszám mellett nagyon magasra választják, nagyobb VDSmax, de alacsonyabb feszültségszintet eredményez a másodlagos oldalsó dióda.
Ha pedig a VR-t túl kicsiként választják ki egy kisebb fordulási arány révén, akkor a VDSmax kisebb lesz, de a másodlagos dióda feszültségszintjének növekedését eredményezi.
A nagyobb primer oldali VDSmax nemcsak a másodlagos oldalsó dióda alacsonyabb feszültségszintjét és az elsődleges áram csökkenését biztosítja, hanem költséghatékony kialakítást is lehetővé tesz.
Visszatérés a DCM móddal
Hogyan lehet kiszámítani a Dmax-ot a Vreflected és a Vinmin függvényében
A VDCmin eseteinél maximális üzemi ciklusra lehet számítani. Erre a helyzetre tervezhetjük a transzformátort a DCM és a CCM küszöbértékei mentén. Ebben az esetben a munkaciklust a következőképpen lehet bemutatni:

4. lépés:
Az elsődleges induktivitási áram kiszámítása
Ebben a lépésben kiszámítjuk az elsődleges induktivitást és az elsődleges csúcsáramot.
A következő képletek használhatók az elsődleges csúcsáram azonosítására:

Amint a fentiek megvalósultak, előre mehetünk és kiszámíthatjuk az elsődleges induktivitást a következő képlet segítségével, a maximális munkaciklus-határokon belül.

Óvatosan kell eljárni a visszacsatolással kapcsolatban, és semmilyen túlterhelési körülmény miatt nem léphet CCM üzemmódba, és ennek a maximális teljesítmény-specifikációnak a figyelembevételével figyelembe kell venni a Poutmax kiszámítását az 5. egyenletben. Az említett állapot akkor is előfordulhat, ha az induktivitás megnő az Lprimax érték fölött, ezért vegye ezeket figyelembe.
5. lépés :
Az optimális magminőség és -méret kiválasztása:
Meglehetősen félelmetesnek tűnhet a megfelelő alapvető specifikáció és struktúra kiválasztása során, ha először tervez repülést. Mivel ez jelentős számú tényezőt és változót vehet figyelembe. Ezek közül néhány kulcsfontosságú lehet: a mag geometriája (pl. EE mag / RM mag / PQ mag stb.), A mag mérete (pl. EE19, RM8 PQ20 stb.) És a mag anyaga (pl. 3C96. TP4, 3F3 stb).
Ha nincs értelme a fenti specifikációkkal kapcsolatban, akkor a probléma hatékony megoldása lehet a standard magválasztási útmutató az alapgyártó által, vagy a következő táblázat segítségét is igénybe veheti, amely nagyjából megadja a standard magméreteket, miközben megtervezi a 65 kHz-es DCM visszacsatolást a kimenő teljesítményre való hivatkozással.

Miután végzett a mag méretének kiválasztásával, itt az ideje kiválasztani a megfelelő orsót, amelyet a mag adatlapjának megfelelően lehet beszerezni. Az orsó további tulajdonságait, például a csapok számát, a NYÁK-rögzítést vagy az SMD-t, a vízszintes vagy függőleges elhelyezést, szintén figyelembe kell venni az előnyös kivitelben
A mag anyaga szintén döntő fontosságú, és a frekvencia, a mágneses fluxus sűrűsége és a magveszteségek alapján kell kiválasztani.
Először kipróbálhatja a 3F3, 3C96 vagy TP4A névvel ellátott változatokat, ne feledje, hogy a rendelkezésre álló alapanyagok neve azonos típusoknál eltérő lehet, az adott gyártástól függően.
A minimális elsődleges fordulatok vagy tekercselés kiszámítása

Ahol a kifejezés Bmax az üzemi maximális fluxus sűrűséget jelöli, az Lpri elmondja az elsődleges induktivitást, az Ipri lesz az elsődleges csúcsáram, míg Ae a kiválasztott magtípus keresztmetszeti területét azonosítja.
Nem szabad elfelejteni, hogy a Bmax soha nem hagyhatja meghaladni a telítő fluxus sűrűségét (Bsat), amint azt az alapanyag adatlapja meghatározza. A ferritmagok Bsat-nál enyhe eltéréseket tapasztalhat, a specifikációtól, például az anyag típusától és a hőmérséklettől függően, de ezek többségének értéke közel 400mT lesz.
Ha nem talál részletes referenciaadatokat, akkor 300mT Bmax értékkel járhat. Bár a magasabb Bmax kiválasztása elősegítheti a csökkentett elsődleges fordulatok számát és az alacsonyabb vezetőképességet, a magveszteség jelentősen megnőhet. Próbáljon optimalizálni ezen paraméterek értékei között úgy, hogy a magveszteség és a rézveszteség egyaránt elfogadható határokon belül maradjon.
6. lépés:
Hogyan kell kiszámítani a fő másodlagos kimenet (Ns) és a kiegészítő segédkimenetek (Naux) fordulatszámát
Azért, hogy meghatározza a másodlagos fordulatokat először meg kell találnunk a fordulási arányt (n), amelyet a következő képlet segítségével lehet kiszámítani:

Ahol Np az elsődleges fordulat, és Ns a másodlagos fordulatok száma, ott Vout a kimeneti feszültséget jelöli, VD pedig a másodlagos dióda feszültségesésével kapcsolatban.
A kívánt Vcc értékhez tartozó segédkimenetek fordulatainak kiszámításához a következő képlet használható:

A segédtekercs elengedhetetlenné válik az összes visszacsatoló konverterben az első indító táp ellátásához a vezérlő IC számára. Ezt az ellátó VCC-t általában a kapcsoló IC táplálására használják az elsődleges oldalon, és az IC adatlapján megadott érték szerint lehet rögzíteni. Ha a számítás nem egész számot ad, akkor egyszerűen kerekítse ki azt a felső egész érték használatával, közvetlenül a nem egész szám fölött.
Hogyan számoljuk ki a vezeték méretét a kiválasztott kimeneti tekercseléshez
A több tekercs vezetékméretének helyes kiszámításához először meg kell találnunk az egyes tekercsek RMS áramerősségét.
Megtehető a következő képletekkel:


Kiindulópontként 150–400 kör / milliméter áramerősség használható amperenként a huzal szelvényének meghatározásához. Az alábbi táblázat bemutatja a megfelelő vezetékmérő kiválasztásának referenciáját 200M / A használatával, az RMS áramértéknek megfelelően. Ezenkívül megmutatja a huzal átmérőjét és az alapszigetelést a szuper zománcozott rézhuzalok válogatott nyomtávához.

8. lépés:
Figyelembe véve a transzformátor felépítését és a tekercselés kialakítását
Miután befejezte a fent tárgyalt transzformátor paraméterek meghatározását, elengedhetetlenné válik annak értékelése, hogy miként illeszthető a vezeték mérete és a fordulatszám a transzformátor számított magméretén belül, valamint a megadott orsó. Ennek optimális elérése érdekében többféle ismétlésre vagy kísérletre lehet szükség a mag specifikációjának optimalizálásához a huzalméret és a fordulatok száma alapján.
A következő ábra az adott tekercselési területét mutatja EE mag . Az egyes tekercsek kiszámított huzalvastagságára és a fordulatok számára való tekintettel megközelítőleg meg lehet becsülni, hogy a tekercs illeszkedik-e a rendelkezésre álló tekercselési területhez (w és h) vagy sem. Ha a tekercs nem felel meg, akkor a kanyarok számától, a huzalmérettől vagy a magméreten kívüli paraméterek közül az egyik, vagy 1nél több paraméter némi finomhangolást igényelhet, amíg a tekercs optimálisan nem illeszkedik.

A tekercselrendezés döntő fontosságú, mivel a munka teljesítménye és a transzformátor megbízhatósága jelentősen függ ettől. Az induktivitás szivárgásának korlátozása érdekében ajánlott a tekercseléshez szendvics elrendezést vagy szerkezetet használni, az 5. ábra szerint.
A nemzetközi biztonsági előírásoknak való megfelelés és betartás érdekében a kialakításnak a primer és a másodlagos tekercsrétegen kellő szigetelési tartományban kell lennie. Ezt biztosítani lehet peremes tekercselésű szerkezet alkalmazásával, vagy egy hármasan szigetelt huzal besorolású másodlagos huzal használatával, amint az a következő ábrán látható

A másodlagos tekercseléshez hármas szigetelésű huzal alkalmazása könnyebbé válik a flyback SMPS tervekre vonatkozó nemzetközi biztonsági törvények gyors megerősítésére. Az ilyen megerősített huzalok azonban valamivel nagyobb vastagságúak lehetnek, mint a normál változat, amely miatt a tekercselés nagyobb helyet foglal el, és további erőfeszítéseket igényelhetnek a kiválasztott orsón belüli elhelyezéshez.
9. lépés
Az elsődleges szorító áramkör megtervezése
A kapcsolási sorrendben a mosfet KI periódusai során szivárgás induktivitás formájában bekövetkező nagyfeszültségű tüskét hajtanak végre a mosfet lefolyón / forráson keresztül, ami lavina bontást eredményezhet, ami végül károsíthatja a mosfet-et.
Ennek ellensúlyozására egy rögzítő áramkört általában az elsődleges tekercsen konfigurálnak, amely azonnal korlátozza a létrehozott tüskét valamilyen biztonságos alacsonyabb értékre.
Talál egy pár rögzítő áramkört, amelyet ebből a célból beépíthetünk, amint azt a következő ábra mutatja.

Ezek nevezetesen az RCD bilincs és a Dióda / Zener bilincs, ahol az utóbbit sokkal könnyebb beállítani és megvalósítani, mint az első opciót. Ebben a szorító áramkörben egy egyenirányító dióda és egy nagyfeszültségű Zener dióda, például egy TVS (tranziens feszültség szuppresszor) kombinációját használjuk a túlfeszültség csúcsának megszorításához.
A. Funkciója zener dióda hatékonyan rögzíteni vagy korlátozni a feszültségcsúcsot, amíg a szivárgási feszültség teljesen át nem tolódik a Zener diódán. A diódás Zener-bilincs előnye, hogy az áramkör csak akkor aktiválódik és szorít, amikor a VR és a Vspike együttes értéke meghaladja a Zener-dióda bontási specifikációját, és fordítva, amíg a tüske a Zener-bontás vagy egy biztonságos szint alatt van, a bilincs lehet, hogy egyáltalán nem vált ki, nem engedve szükségtelen energiaeloszlást.
Hogyan válasszuk ki a szorító dióda / Zener besorolást
Ennek mindig a visszavert VR feszültség vagy a feltételezett tüskefeszültség kétszeresének kell lennie.
Az egyenirányító diódának ultragyors helyreállításnak vagy schottky típusú diódának kell lennie, amelynek névleges értéke meghaladja a maximális egyenáramú összeköttetés feszültségét.
Az RCD típusú befogás alternatív lehetőségének hátránya, hogy lelassítja a MOSFET dv / dt-jét. Itt az ellenállás ellenállási paramétere döntő fontosságúvá válik, miközben korlátozza a feszültségcsúcsot. Kis értékű Rclamp kiválasztása javítja a tüske elleni védelmet, de növelheti a szórást és az energiapazarlást. Ezzel szemben, ha nagyobb értékű Rclamp-ot választunk, ez segít csökkenteni a szórást, de lehet, hogy nem olyan hatékony a tüskék elnyomása .

A fenti ábrára hivatkozva a VR = Vspike biztosítása érdekében a következő képletet lehet használni

Ahol a szivárgás a transzformátor induktivitását jelöli, és megtalálható a szekunder tekercsen rövidzárlat létrehozásával, vagy alternatív megoldásként ökölszabályt lehet beépíteni az elsődleges induktivitás értékének 2–4% -ának alkalmazásával.
Ebben az esetben a Cclamp kondenzátornak lényegesen nagynak kell lennie, hogy megakadályozza a feszültség növekedését a szivárgási energia abszorpciós periódusában.
A Cclamp értéke 100pF és 4,7nF között választható, az ebben a kondenzátorban tárolt energiát az Rclamp gyorsan kisüti és frissíti az eacj kapcsolási ciklus alatt.
10. lépés
A kimeneti egyenirányító dióda kiválasztása

Ez kiszámítható a fenti képlettel.
Győződjön meg arról, hogy a specifikációkat úgy választotta meg, hogy a dióda maximális fordított feszültsége vagy VRRM-értéke ne legyen kevesebb, mint 30%, mint a VRVdiode, és ügyeljen arra is, hogy az IF vagy a lavina előremenő áramértéke legalább 50% -kal nagyobb legyen, mint az IsecRMS. A vezetési veszteség minimalizálása érdekében előnyösen schottky diódát válasszon.
DCM áramkör esetén a Flyback csúcsáram nagy lehet, ezért próbáljon meg olyan diódát választani, amelynek alacsonyabb az előremenő feszültsége és viszonylag nagyobb az áramértéke a kívánt hatékonysági szint szempontjából.
11. lépés
A kimeneti kondenzátor értékének kiválasztása
A kiválasztása helyesen kiszámított kimeneti kondenzátor míg a visszacsatolás megtervezése rendkívül fontos lehet, mert a visszacsatolási topológiában a tárolt induktív energia nem érhető el a dióda és a kondenzátor között, ami azt jelenti, hogy a kondenzátor értékét 3 fontos szempont figyelembe vételével kell kiszámítani:
1) Kapacitás
2) ESR
3) RMS áram
A legkisebb lehetséges érték meghatározható a maximálisan elfogadható csúcs-csúcs kimeneti hullámfeszültség függvényétől függően, és a következő képlettel azonosítható:

Ahol az Ncp az elsődleges oldalsó óraimpulzusok számát jelenti, amelyre a vezérlés visszacsatolása szükséges a feladat vezérléséhez a megadott maximális és minimális értékektől. Ehhez általában körülbelül 10-20 kapcsolási ciklus szükséges.
Az Iout a maximális kimeneti áramra vonatkozik (Iout = Poutmax / Vout).
A kimeneti kondenzátor maximális RMS-értékének meghatározásához használja a következő képletet:

A visszacsatolás meghatározott magas kapcsolási frekvenciájához a transzformátor szekunder oldaláról érkező maximális csúcsáram megfelelő magas hullámfeszültséget generál, amelyet a kimeneti kondenzátor egyenértékű ESR-jére vetnek. Ezt figyelembe véve biztosítani kell, hogy a kondenzátor ESRmax névleges értéke ne haladja meg a kondenzátor meghatározott elfogadható hullámáram-képességét.
A végleges terv alapvetően tartalmazhatja a kívánt feszültségértéket és a kondenzátor hullámáram-képességét, a kiválasztott kimeneti feszültség és a visszacsatolás aktuális tényleges aránya alapján.

Győződjön meg arról, hogy a ESR érték az adatlap alapján határozható meg az 1 kHz-nél magasabb frekvencia alapján, amely általában feltételezhető, hogy 10 kHz és 100 kHz között van.
Érdekes lenne megjegyezni, hogy az alacsony ESR specifikációjú magányos kondenzátor elegendő lehet a kimeneti hullámzás szabályozásához. Megpróbálhat egy kis LC-szűrőt beépíteni a nagyobb csúcsáramokhoz, különösen, ha a visszacsatolást úgy tervezték, hogy DCM üzemmóddal működjön, ami garantálhatja a kimeneten egy meglehetősen jó hullámfeszültség vezérlést.
12. lépés
További fontos szempontok:
A) Hogyan válasszuk ki a feszültséget és az áramerősséget az elsődleges oldali híd egyenirányítóhoz.

Megtehető a fenti egyenleten keresztül.
Ebben a képletben A PF a teljesítménytényezőt jelenti tápegységének 0,5-ét alkalmazhatjuk arra az esetre, ha megfelelő referencia elérhetetlenné válik. A hídirányító számára válassza ki az IACRMS-nél kétszer nagyobb előerősítővel rendelkező diódákat vagy modult. A feszültség névleges értéke 600 V-nál választható ki, maximum 400 V AC bemeneti specifikációhoz.
B) Hogyan válasszuk ki az aktuális érzékű ellenállást (Rsense):
Kiszámítható a következő egyenlettel. Az Rsense érzékelő ellenállást beépítik a maximális teljesítmény értelmezéséhez a visszalépés kimenetén. A Vcsth érték a vezérlő IC adatlapjára hivatkozva határozható meg, az Ip (max) az elsődleges áramot jelöli.

C) A kondenzátor VCC kiválasztása:
Optimális kapacitásérték kulcsfontosságú a bemeneti kondenzátor számára a megfelelő indítási időszak biztosításához. Általában bármely 22uF és 47uF közötti érték szépen elvégzi a munkát. Ha azonban ezt sokkal alacsonyabbra választja, akkor a vezérlő IC „feszültség alatti reteszelésének” kiváltásához vezethet, mielőtt a Vcc fejlődni tudna az átalakító által. Éppen ellenkezőleg, egy nagyobb kapacitási érték az átalakító indítási idejének nemkívánatos késését eredményezheti.
Ezenkívül győződjön meg arról, hogy ez a kondenzátor a legjobb minőségű, nagyon jó ESR és hullámáram-specifikációkkal rendelkezik, a kimenettel egyenértékű kondenzátor specifikációi . Erősen ajánlott egy 100nF nagyságrendű, kisebb értékű kondenzátort csatlakoztatni, a fent tárgyalt kondenzátorral párhuzamosan, és a lehető legközelebb a vezérlő IC Vcc / föld csatlakozóihoz.
D) A visszacsatolási hurok konfigurálása:
A visszacsatolási hurok kompenzációja fontossá válik az oszcilláció kialakulásának megállításához. A hurok kompenzációjának konfigurálása egyszerűbb lehet a DCM módú visszalépésnél, mint a CCM, mivel a teljesítmény szakaszában nincs „jobb félsík nulla”, és ezért nincs szükség kompenzációra.

Amint azt a fenti ábra jelzi, az egyenes RC (Rcomp, Ccomp) többnyire éppen eléggé elegendő ahhoz, hogy fenntartsa a hurok jó stabilitását. Általában az Rcomp értéke bármit kiválaszthat 1K és 20K között, míg a Ccomp 100nF és 470pF között lehet.
Ezzel befejezzük a flyback átalakító tervezésével és kiszámításával kapcsolatos bonyolult vitánkat. Ha bármilyen javaslata vagy kérdése van, akkor tegye fel őket a következő megjegyzési mezőbe, és kérdéseire ASAP válaszoljon.
Udvariasság: Infineon
Korábbi: Ultrahangos vezeték nélküli vízszint jelző - napenergiával működő Következő: A PID-vezérlő megértése