A bejegyzés elmagyarázza az egyszerű vonalas lézerrel vezérelt motorvezérlő áramkört, amely úgy működik, hogy reagál egy precíziós vízszintes lézervonalra, amelyet egy vonalas lézeres szintező készülék generál, és automatikusan rendkívül tökéletesen és pontosan állítja be a csatlakoztatott eszköz vagy a munka beállítását.
Mi a Line Laser
A vonal lézerberendezés nagy pontosságú elektronikus cseréje az ácsok öreg vízmérték-szintezőjének.
A vonalas lézer eszköz valójában egy fejlett lézersugárzó berendezés, amely 360-at képes létrehozni ° nagy pontosságú, megvilágított vízszintes lézervonal, kalibráló referencia biztosításához az összes ipari vagy építőipari mérnöki munkához, így a munka végeredménye tökéletesen egyenes és egyenes hiba nélkül állítható be.
Az áramkört a blog egyik elkötelezett olvasója, Mr. Rafal kérte.
A vonalas lézerrel vezérelt motor munkamódszerével kapcsolatos részletes megbeszélések a következő bekezdésekből tanulhatók:
Tervezési cél
Úr. Rafal: Nagyon új vagyok ebben. Az elmúlt hetekben elvégeztem néhány kutatást, és nem találtam meg pontosan azt, amire szükségem van.
Hálás leszek minden segítségért. Csatolok egy fényképet az ötletemről. Két 12 V-os egyenáramú motort szeretnék lézeres szinttel vezérelni.
A vonal lézeres szint jelzi a vevőket.

Ennek a jelnek akkor vezérelnie kell a 12 V DC motor irányát. A motor előre és hátra forgatja a menetes rudat a szerszám magasságának beállításához.
Amit felfedeztem, több fotodióda lenne párhuzamosan csatlakoztatva, az egyik a nulla szint feletti, a másik a szint alatt lévő lézer detektálására szolgál. A nullszint csak egyfajta szünet a fotodiódák között, hogy a rendszer ne ébredjen fel. Lézeres érzékelő kijelző nélkül. Csak képes képet adtam.
Szükségem van egy H híd áramkörre, de az általam találtakat Arduino rendszerrel kell használni. Szükség esetén kész hidat vásárolhatok elfogadható áron, legfeljebb 30 dollárig
Ideális esetben ez a vörös és a zöld lézerrel is működne, de a hullámhosszak annyira különböznek, hogy kétlem, hogy meg lehetne csinálni, és nem működne a teljes fényspektrumban.
Eleinte szeretném ennek a fénynek a szintjét a motorokhoz rögzíteni a fel-le gombokkal. Örülnék, ha a második motor ekkor beállítaná magát a giroszkóppal, miközben állítja, de az Arduino nélkül nagyon nehéz lehet.
Úgy érzem, amit próbálok, olyan egyszerű, hogy megúszhatom az Arduino használatát. És ragaszkodom egy analóghoz, az építkezés nehéz körülményei miatt, és számomra úgy tűnik, hogy minél több az elektronika, annál megbízhatatlanabb a készülék.
Csak beltérben működik, és a lézertávolság max. 10m. Az elején talált motor nagy áramfogyasztása 200mA max 2,19 A, ugyanakkor nagy a nyomatéka is.
Tápellátás 18 V DC egy Makita akkumulátorból.
Előre is köszönöm a javaslatokat.
Üdvözlet Lengyelországból
Rafal
Menő : Zavart vagyok a motortengelyek működésével kapcsolatban. Mindkét motor menetes csavarja nyomja a szerszámot, de nem tudja visszahúzni? Hogy működik ez?
Lehetséges ugyanezt egyetlen motorral megvalósítani?
Úr. Rafal: Az alsó szintező egyenesek talán 70 cm-esek lennének, csak kis helyiségeknél, pl. egy WC, hogy beléphessen egy ajtón.
Gép hajtás nélkül, kézzel meghúzva, csak kiegyenlítő egyenesek. A videóban az árbocokon található két sárga tárgy mereven az egyenesekhez rögzített lézeres detektor.
A lézer valahol távolabb áll, és vízszintes vonalat hoz létre.
A motorokat egy szekérhez, a menetes csavart pedig az egyenesek lézeres detektorokkal történő kiegyenlítéséhez rögzítik. Két motornak kell lennie mindkét oldal szintezéséhez, de ez tükörkép.
Az egyetlen közös rész egy kétcsatornás H-híd lenne, mintha kész modulból és esetleg giroszkópból csinálnám, de ez egy álom :).
Fontos, hogy legyen gomb a bal és a jobb motor fordulatához.
Az eljárás ez. A lézert például 2 m-rel felakasztom a kijelölt padlószint fölé. 2 métert mérek a lézersugártól az egyenesek alsó széléig.
Úgy szabályozom a kapcsolókat, hogy a magasság megnyomja a jobb-bal oldali kapcsolókat úgy, hogy 2 méterrel megegyezzen az egyenesek alsó szélével. Az érzékelőket úgy helyezem az árbocokra, hogy a lézersugár nulla szinten legyen a fotodióda szakaszok között. A többi pedig meg fogja tenni magát
A mellékletbe tettem egy rajzot a detektor működéséről.
Rafal
Áramkör tervezés

A fenti ábrára nézve két ilyen egyforma áramkör-fokozatra lesz szükség a kapcsolódó motorral vezérelt szerszám észleléséhez és korrekciójához a lézervonal egyenességi pontossága szempontjából.
A két azonos szakasz egymás tükörképe, az alábbiak szerint:

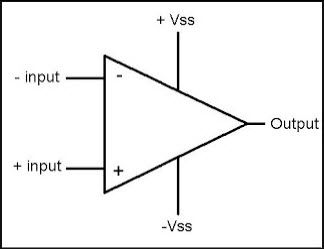
Az áramkör meglehetősen egyszerű. Ablak-komparátorral működik, amely biztosítja, hogy a hajtómotorok ne működjenek, mindaddig, amíg az LDR-párok azonos lézervonal-fényerővel vannak kitéve.
Ezután a tápfeszültség egyik fele jön létre az A1 nem invertáló bemenetén és az A2 invertáló bemenetén.
Amint a lézervonal alakváltozását észlelik (ami akkor fordulhat elő, ha a motor által vezérelt szerszám nincs egyenesen beállítva), az R1 és R2 LDR-t érintő fényerő megváltozik.
Ebben a helyzetben az ablak-összehasonlító bemeneti feszültsége elvezet a tápfeszültség felétől. Ez a helyzet arra készteti az összehasonlító kimenetet, hogy a motorhíd-hálózatra utasítsa a motort az óramutató járásával megegyező vagy az óramutató járásával ellentétes irányba.
Tranzisztorok T1. . . A T4 hídhálózatként van konfigurálva, hogy lehetővé tegye a motor bekapcsolását előre és hátra irányban az LDR megvilágításától vagy a lézervonal eltérési szögétől függően.
Diódák D1. . . A D4 helyzetben vannak, hogy megszüntessék a motor avtív és járási ideje alatt keletkező feszültségcsúcsokat. Az előre beállított P1 és P2 potenciométerek feladata az igazítás beállításának megkönnyítése.
Ezeket úgy finomhangolják, hogy biztosítsák a motor teljes kikapcsolását és inaktivitását, mindaddig, amíg az érintett LDR pár pontosan ugyanolyan lézerfény-fénynek van kitéve.
Tegyük fel például, hogy a motor által vezérelt eszköz helytelen beállítása miatt a lézervonal dőlése miatt a fény csökken az LDR R2-n, mint az LDR R1. Ennek eredményeként az A pontban a feszültség a tápfeszültség fele fölé emelkedik.
Ebben a helyzetben az A1 op erősítő kimenete magasra válik, működésre kényszerítve a T1 és T4 tranzisztort. Ez viszont a motornak a megfelelő irányba történő forogását okozza. Ez a művelet automatikusan egyenes vonalban tolja el a csatlakoztatott szerszámot, amíg vízszintes igazítási pontossága nem esik egybe a lézervonal pontosságával.
Ezzel szemben, ha feltételezzük, hogy a szerszám ellentétes irányban dől, úgy, hogy az LDR-ek megvilágítása ellentétes a fentiekben tárgyaltakkal, akkor az A pontban lévő feszültség a tápfeszültség fele alá csökken. Ez a feltétel arra készteti az A2 kimeneti erősítőt, hogy magasra emelkedjen, így a T3 és a T2 működőképessé válik.
Ez azt eredményezi, hogy a motor most ellentétes irányban halad, és megpróbálja korrigálni a szerszám illesztését az adott irányban, amíg tökéletesen egyenesbe nem esik, egybeesik a lézervonal vízszintes pontosságával.
Fel / Le gomb
A vízmérték magasságának kezdeti beállításához szükséges felfelé mutató gombokat egyszerűen úgy lehet megvalósítani, hogy az egyes LDR-ekkel párhuzamosan nyomógombos kapcsolókat huzaloznak.
LDR telepítés
Annak érdekében, hogy az LDR-k helyes választ kapjanak, a bal oldali jobb párokat úgy kell elhelyezni egy cső belsejében, hogy a burkolat olyan legyen, hogy csak a lézer megvilágítását láthassák, és semmilyen más környezeti fényt ne.
Az ötlet a következő képen tanúskodhat:

Itt láthatjuk, hogy az LDR-k nagyon közel helyezkednek el egymás mellett, ami biztosítja, hogy amikor a lézervonal pontosan a középpontban van, akkor mindkét LDR-pár bizonyos része egyenletesen világít a lézerfénnyel.
Az LDR burkolat elülső részét diffúz lencsével lehet lefedni, így a lézer megvilágítása belül egyenletesen elosztható a megfelelő LDR-ek felett.
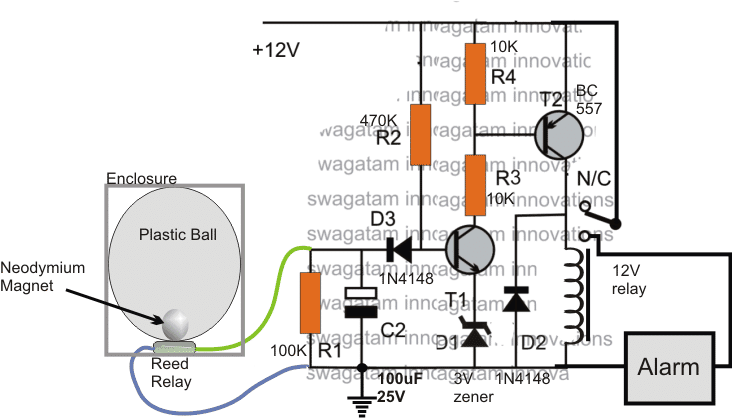
Korábbi: Egyszerű lopásgátló riasztó áramkör az értékes tárgyak védelme érdekében Következő: Univerzális BJT, JFET, MOSFET tesztelő áramkör