Egy elektromos gép, amely átalakítja az elektromos energiát mechanikai energiába elektromos motornak nevezzük. Az első és legfontosabb elektromos motor egy egyszerű elektrosztatikus eszköz, amelyet Andrew Gordon skót szerzetes hozott létre az 1740-es években. De 1821-ben Michael Faraday bemutatta az elektromos energia átalakítását mechanikai energiává.
Az elektromos motorokat elsősorban két kategóriába sorolják: váltóáramú motorok és DC motorok . Ismét mindegyik kategória sok típusra oszlik. Számos teher, például keverő, daráló, ventilátorok stb., Leggyakrabban használt háztartási készülékek, amelyekben különböző típusú motorokat találhatunk, és ezek különböző sebességgel működtethetők a motor fordulatszám-szabályozásával. Ebben a cikkben az egyenáramú motorok egyik fő típusáról fogunk beszélni, nevezetesen Léptetőmotor és vezérlése a mikrovezérlő segítségével.
Léptető motor
Egy szinkron és kefe nélküli egyenáramú motor amely az elektromos impulzusokat mechanikus mozgásokká alakítja, és így lépésenként, bizonyos szöggel forog az egyes lépések között a teljes forgás teljesítéséhez, Stepper Motornak hívják. A léptetőmotor forgási lépései közötti szöget a motor léptetőszögének nevezzük.

Léptető motor
A léptetőmotorokat tekercselésük szerint két típusba sorolják: Unipolar Stepper Motorok és Bipolar Stepper Motorok. Az unipoláris léptetőmotort gyakran használják számos alkalmazásban, mivel a bipoláris léptetőmotorhoz képest könnyen kezelhető. De léteznek különböző típusú léptetőmotorok, mint például az állandó mágneses léptetőmotor, a változó reluktivitású léptetőmotor és a hibrid léptetőmotor.
Léptetőmotor vezérlés
A léptetőmotor különféle technikákkal vezérelhető, de itt a léptetőmotor vezérlését tárgyaljuk egy Atmega mikrovezérlő . A 89C51 a mikrovezérlő 8051 mikrovezérlő család .

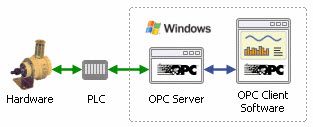
A léptetőmotor vezérlésének blokkvázlata
A léptetőmotor 8051 mikrovezérlővel történő vezérlésének blokkvázlatát az ábra mutatja tápegység , mikrovezérlő, léptető motor és vezérlő kapcsoló blokkok.
2 módszer a léptetőmotor vezérlő áramkörének megtervezéséhez
A léptető motor vezérlőjét úgy tervezték 8051 mikrokontrollerrel és kapcsoló áramkör a léptető motor fordulatszámának szabályozásához. A vezérlő kapcsoló áramköre használatával megtervezhető tranzisztorkapcsolók vagy léptető motorvezérlő IC, például ULN2003 használatával a tranzisztorok helyett.
1. Vezesse az áramkört a léptető motor vezérlő IC-vel
Az unipoláris léptetőmotort az állórész tekercseinek egymás utáni áramellátásával lehet forgatni. Ezeknek a feszültségjeleknek a motortekercseken vagy vezetékeken átmenő sorrendje elegendő a motor meghajtásához, ezért nincs szükség meghajtó áramkörre az állórész tekercsében lévő áram irányának szabályozásához.

Léptetőmotor vezérlés IC-vel
A kétfázisú léptetőmotor négy végvezetékből áll, amelyek a tekercsekhez vannak csatlakoztatva, és két közös vezetékből, amelyek a két végvezetékhez vannak kapcsolva, két fázist alkotnak. A két fázis közös pontjai és végpontjai a földhöz vagy a Vcc-hez, illetve a mikrokontroller csapjaihoz kapcsolódnak. A motor forgatásához a két fázis végpontjait feszültség alá kell helyezni. Elsődlegesen az 1. fázis első végpontjára feszültséget, a 2. fázis első végpontjára pedig további feszültséget adnak stb.
A léptetőmotor különféle üzemmódokban működtethető, például hullámhajtásos léptető üzemmódban, teljes hajtású léptető üzemmódban és félhajtásos léptető üzemmódban.
Hullámhajtás léptető mód
A fenti sorrend megismétlésével a motor hullámhajtásos léptető üzemmódban forgatható az óramutató járásával megegyező vagy az óramutató járásával ellentétes irányban, a végpontok kiválasztása alapján. Az alábbi táblázat a hullámhajtás-léptető üzemmód jelfázis-sorrendjét mutatja.


Hullámhajtás léptető mód
Teljes meghajtású léptető mód
A két fázis két végpontjának feszültségellátása egyidejűleg teljes hajtáslépési módot eredményez. A táblázat a teljes hajtás-léptetés üzemmód jelfázis-sorrendjét mutatja.


Teljes meghajtású léptető mód
Half Drive Stepping mód
A hullám és a teljes hajtás-léptetés módok kombinációja fél hajtás-léptetés módot eredményez. Így ebben a módban a lépésszög felére oszlik. A táblázat egy fél hajtás-léptetés üzemmód jelfázis-sorrendjét mutatja.


Half Drive Stepping mód
Általában a lépési szög a léptető motor felbontásától függ. A lépésszám és a forgásirány egyenesen arányos a bemeneti szekvencia számával és sorrendjével. A tengely forgási sebessége a bemeneti sorrend frekvenciájától függ. A nyomaték és az egyszerre mágnesezett mágnesek száma arányosak.
A léptetőmotor 60mA áramot igényel, de az Atmega AT89C51 mikrovezérlő maximális áramértéke 50mA. Tehát egy léptető-motor-vezérlőt IC használnak a léptető motor és a mikrovezérlő összekapcsolására a jelek továbbítására.
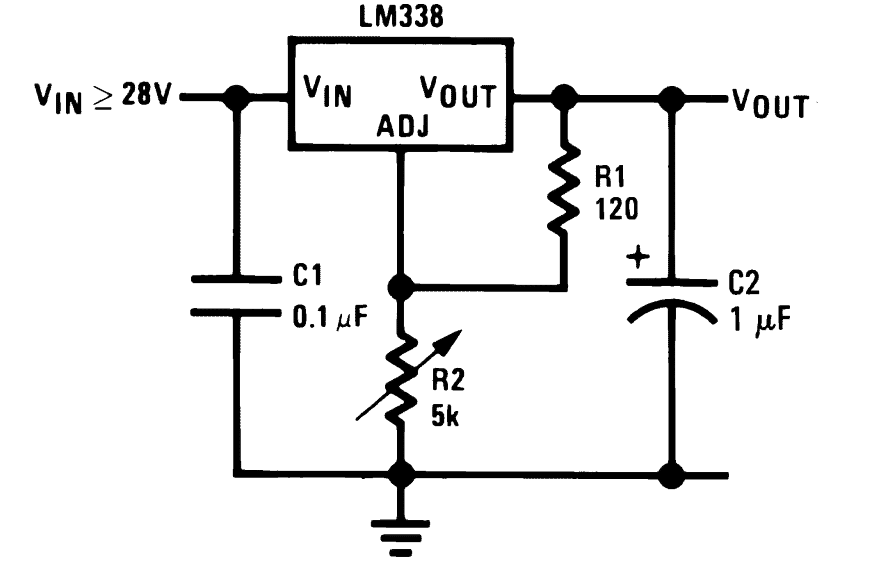
2. Vezérlő kapcsoló áramköre tranzisztorokkal
Az áramellátás a feszültség 230 V-ról 7,5 V-ra történő csökkentésével adható meg egy transzformátor segítségével, majd diódákkal ellátott hídirányítóval történő egyenirányítás . Ezt az egyenirányított kimenetet egy szűrőkondenzátorba táplálják, majd átvezetik a feszültségszabályozón. Az 5V-os szabályozott kimenetet a feszültségszabályozótól kapjuk. A visszaállító 9 tű a kondenzátor és az ellenállás között van összekötve.

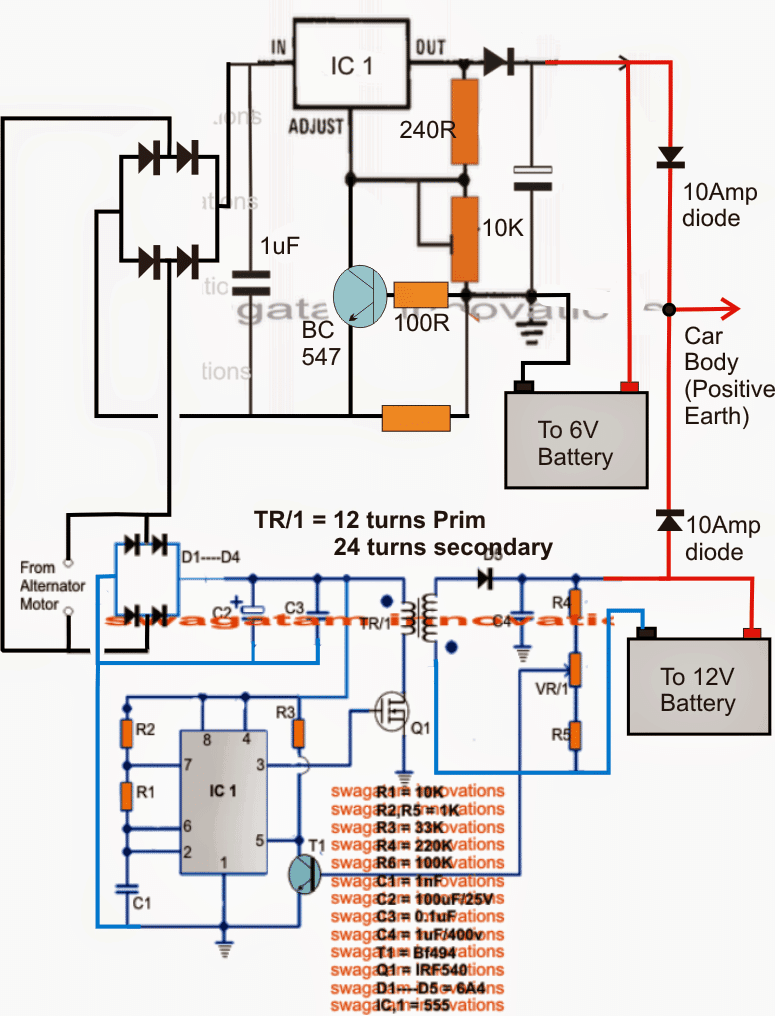
Léptetőmotor vezérlő áramkör tranzisztor segítségével
Általában a léptetőmotor négy tekercsből áll, az ábra szerint. Tehát a motor meghajtásához négy motor-meghajtó áramkörre van szükség. Ahelyett, hogy a léptető motorvezérlő IC-t használná a motor meghajtására, négy tranzisztort csatlakoztatnak meghajtó áramkörként a mikrovezérlő 21, 22, 23 és 24 érintkezőjénél.
Ha a tranzisztorok megkezdik a vezetést, akkor a tekercs körül mágneses mező jön létre, ami a motor forgását okozza. A léptető motor fordulatszáma egyenesen arányos a bemeneti impulzus frekvenciájával. Kristályoszcillátor van csatlakoztatva a 18 és 19 érintkezőkhöz, hogy a mikrovezérlő órajelének frekvenciája körülbelül 11,019MHz legyen.
Bármely utasítás végrehajtási ideje kiszámítható az alábbi képlet segítségével
Idő = ((C * 12)) / f
Ahol C = a ciklus száma
F = kristályfrekvencia
Az alábbiakban ismertetjük az egyik alkalmazásalapú áramkört, amely léptetőmotort használ a napelem forgatásához.
Léptetőmotor-vezérlés programozott 8051 mikrovezérlő használatával
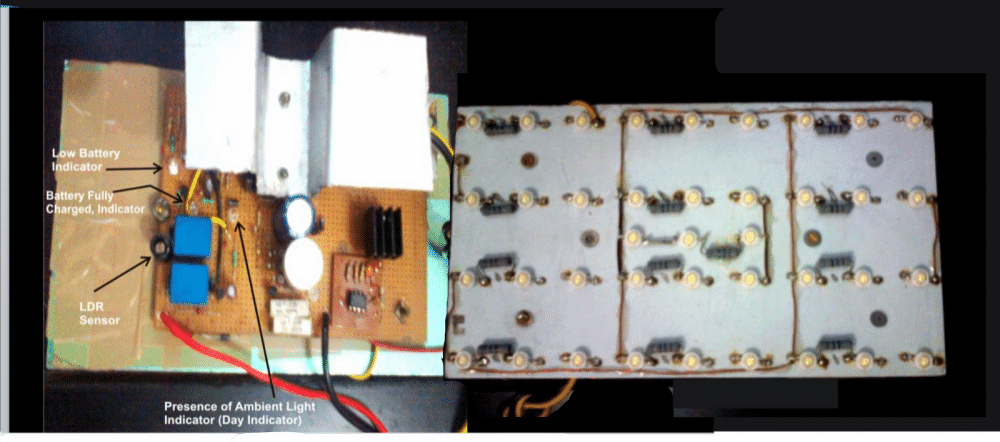
Napkövető napelem projekt célja a maximális energiamennyiség előállítása a napelem automatikus beállításával. Ebben a projektben a 8051 család programozott mikrovezérlőjével vezérelt léptetőmotor kapcsolódik a napelemhez, hogy a napelemek arca mindig merőleges legyen a napra.

Léptetőmotor-vezérlés mikrovezérlővel, az Edgefxkits.com
A programozott mikrovezérlő rendszeres időközönként lépcsőzetes elektromos impulzusokat generál a léptetőmotorhoz a napelem forgatásához. A meghajtó IC-t a léptető motor meghajtására használják, mivel a vezérlő nem képes kielégíteni a motor teljesítményigényét.
Kérjük, hagyja meg javaslatait, visszajelzéseit és kérdéseit az alábbi megjegyzés szakaszban található megjegyzések közzétételével. Mindent megteszünk, hogy technikai segítséget nyújtsunk a cikk és elektromos és elektronikai projektek kidolgozása léptetőmotor segítségével.