Az első vezérlő rendszer „James Watt's Flyball kormányzója” találta fel 17-ben. Ennek az eszköznek a fő célja a motor állandó fordulatszámának fenntartása a motor gőzellátásának megváltoztatásával. Jelenleg az irányítási rendszernek alapvető szerepe van a modernben technológia mert ezek a rendszerek hatással lesznek a mindennapi életünkre vagy annál inkább. A vezérlőrendszerek legjobb példái: gépkocsik, légkondicionálók, hűtőszekrények, geezerek stb. Ezeket a rendszereket az ipar különböző termékeiben használják minőségellenőrzéshez, közlekedési rendszerek, robotika, fegyverrendszerek, űrtechnika stb. / nem mérnöki területek. Ez a cikk áttekintést nyújt arról, hogy mi a vezérlőrendszer, és annak egyik típusát, nevezetesen a nyílt hurkú vezérlőrendszert.
Mi az a vezérlőrendszer?
Meghatározás: A vezérlőrendszer meghatározható egy olyan rendszer kimeneteként, amely a bemenetének megváltoztatásával vezérelhető. Tehát a rendszer viselkedése differenciálegyenletek segítségével kifejezhető. Tehát a kívánt kimenet egy vezérlőrendszerben érhető el a rendszer viselkedésének kezelésével, irányításával vagy parancsolásával. Vezérlő rendszerek két típusba sorolhatók, nevezetesen a nyílt hurkú és a zárt hurkú vezérlő rendszerek.
Mi az Open-Loop vezérlőrendszer?
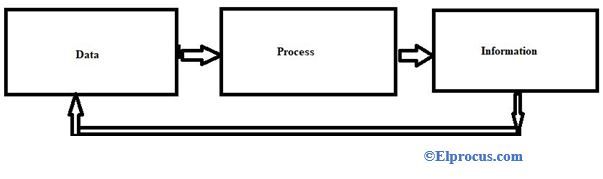
A nyílt hurkú vezérlőrendszer blokkvázlata az alábbiakban látható. Az alábbi ábrán a bemenet megadható a vezérlőrendszernek, hogy a kívánt kimenet elérhető legyen. Ez a kapott kimenet azonban nem tekinthető ennek a rendszernek a további referencia bemenetként történő felhasználásával.
A következő rendszerben két blokkot tartalmaz, mint például a vezérlő, valamint a vezérelt folyamat. Általában a rendszer számára adott bemenet főleg a szükséges kimenettől függ. A bemenet alapján a vezérlőjel a vezérlőn keresztül generálható. Ez a jel megadható a feldolgozó egységnek. Ezért a vezérlőjel alapján megfelelő feldolgozás hajtható végre a kimenet elérése érdekében.

Nyissa meg a hurokvezérlő rendszert
A nyílt hurkú vezérlőrendszerben nincs visszacsatolási útvonal. Tehát ez az oka annak, hogy a nyílt hurkú vezérlőrendszer bemenete független a kimenettől. Itt figyelemre méltó, hogy ez általában hibát generál a rendszeren belül, mert nincs esély a bemenet megváltoztatására, ha a kimenet bemutatja a becsült értéktől való eltérést.
Példák nyílt hurkú vezérlőrendszerre a következőket tartalmazzák.
- Automata mosógép
- Kávé vagy tea készítő gép
- Hangerő a sztereó rendszeren
- Elektromos kézszárító
- Kenyérpirító
- Tintasugaras nyomtatók
- Szervomotor / Szervomotor
- Villanykörte
- Szárítóbb ruhák időzítő alapján
- Lámpa kapcsoló
- tévé távirányító
- Vízcsap
- Ajtózár rendszer
Vezérlő rendszer jellemzői
A rendszer jellemzői a következők.
- A vezérlőrendszer jellemzői főleg minden olyan vezérlőrendszer matematikai kapcsolatát tartalmazzák, amelynek tisztának kell lennie a rendszer bemenete és kimenete között.
- Lineáris vezérlőrendszer esetén a bemenet és a kimenet közötti kapcsolat lineáris arányosságon keresztül határozható meg.
- Nemlineáris vezérlőrendszer esetében a bemenet és a kimenet közötti kapcsolat lineáris arányosságon keresztül jelölhető.
A jó ellenőrzési rendszerhez a következő tényezőkre van szükség.
- Pontosság
- Rezgés
- Érzékenység
- Sebesség
- Zaj
- Sávszélesség
- Stabilitás
Jellemzők
A nyílt hurkú vezérlőrendszer jellemzői:
- Nincs ellentét a valós és az előnyben részesített értékek között.
- A kimenet értékét nem befolyásolja.
- Minden bemeneti beállítás meghatározza a vezérlő beállított működési helyét.
- A külső körülmények változásai hatással lesznek a kimenet közvetlen megváltoztatására.
Példa az Open-Loop vezérlőrendszerre
Megfigyelhetjük a forgalmat fényvezérlő különböző útkereszteződéseknél. A vezérlőrendszeren keresztül generált jelek időfüggőek. A vezérlő tervezési időpontjában belső időzítés adható meg a vezérlőnek.
Így, ha egy forgalmi jel vezérlője rögzül az átkelőhelyen, akkor minden jel megjeleníthető a vezérlőn keresztül.
Itt a vezérlő rendszernek nincs mit végrehajtania az előállított kimenet felhasználásával, mert egyik oldalán sem tudja megváltoztatni a bemenetét az ott folyó forgalom alapján. Bizonyos rögzített időrés után, az elsődlegesen generált bemenet alapján, a vezérlő rendszer generálja a kimenetet.
Itt, a vezérlőrendszerben, az időzítési sorrendet az alkalmazott relék biztosíthatják.
Tehát egyértelműen jelzi, hogy a bemenet független marad a létrehozott kimenettől.
Vegye figyelembe az alább látható vezérlőrendszert.
“mi az a nic? ”

Átviteli funkció
Egy vezérlőrendszer átviteli függvényét a következő egyenlet felhasználásával lehet levezetni.
G (S) = Kimenet / Bemenet
Ha a fenti átviteli függvényt minden blokkon külön vesszük figyelembe, akkor az alábbiak szerint adjuk meg.
Az első G1 (S) mondat esetében az átviteli funkció G1 (S) = Y1 / Yi
G2 (S) = Y2 / Y1 esetén
G3 (S) = Y0 / Y2 esetén
Tehát a teljes átviteli függvény kiszámítható
G1 x G2 x G3 = Y1 / Yi * Y2 / Y1 * Y0 / Y2
Tehát a nyílt hurok erősítése kiszámítható G = Yo / Yi
Tehát a nyílt hurkú vezérlőrendszer meghatározza, hogy a rendszerüzemeltető készen áll-e a kimeneten belüli legkisebb különbség mérlegelésére a becsült értéktől.
Előnyök
A a nyílt hurkú vezérlőrendszer előnyei a következőket tartalmazzák.
- Nagyon egyszerű és könnyen megtervezhető ilyen típusú vezérlőrendszerek.
- Alacsony költség, összehasonlítva más rendszerekkel
- Kevesebb karbantartás
- A kimenet stabil
- Nagyon alkalmas használatra
- Kényelmes működés
Hátrányok
A nyílt hurkú vezérlőrendszer hátrányai a következők.
- A sávszélesség kisebb.
- Pontatlan
- A visszacsatolás nélküli rendszer nem megbízható, ha kimenetüket külső zavarok befolyásolják,
- A kimeneti különbségek nem javíthatók automatikusan.
- Időszerű újrakalibrálást igényel.
- Ezek az ellenőrzési rendszerek horizontálisabban állnak a hibákhoz.
- Az előnyös kimeneten belüli változások zavarok lehetnek.
- A kimenet változása automatikusan elvégezhető
Alkalmazások
A nyílt hurkú vezérlőrendszer alkalmazásai a következőket tartalmazzák.
- A közlekedési lámpák vezérlő rendszerében használják
- Merülő rúd
- TV távirányító,
- Automata mosógépek,
- Fűtők a szobákban
- Ajtónyitás és automatikusan bezárja a rendszereket.
Így erről van szó a nyílt hurkú vezérlőrendszer áttekintése . Ebben a fajta vezérlőrendszerben nincs hatással a bemeneti jel vezérlésére. Ezeket általában visszacsatolási rendszerként ismerik, mivel nem tartalmaz semmilyen visszajelzést annak eldöntésére, hogy elérték-e a szükséges kimenetet. Itt egy kérdés az Ön számára, mi az a zárt hurkú vezérlőrendszer?



![IC 4060 reteszelési probléma [megoldva]](https://electronics.jf-parede.pt/img/timer-delay-relay/35/ic-4060-latching-problem.jpg)