Kétirányú vezérlő áramkörnek nevezzük azt az áramkört, amely lehetővé teszi a csatlakoztatott motor működését az óramutató járásával megegyező és az óramutató járásával ellentétes irányban.
Az alábbi első terv egy teljes híd vagy H híd alapú kétirányú motorvezérlő áramkört ismertet, az IC LM324 4 opampjával. A második cikkben megtudhatunk egy nagy nyomatékú kétirányú motorvezérlő áramkört az IC 556 segítségével
Bevezetés
Általában, mechanikus kapcsolók szokták beállítani az egyenáramú motor forgásirányát. Az alkalmazott feszültség és a motor polaritásának beállítása az ellenkező irányba forog!
Egyrészt ennek hátránya lehet, hogy egy DPDT kapcsolót kell hozzáadni a feszültség polaritásának megváltoztatásához, de csak olyan kapcsolóval foglalkozunk, amely meglehetősen megkönnyíti az eljárást.
Ugyanakkor a DPDT-nek egy komoly problémája lehet, nem ajánlott hirtelen invertálni a feszültséget egy egyenáramú motor felett annak forgási mozgása során. Ez egy jelenlegi csúcsot eredményezhet, amely kiégheti a hozzá tartozó sebességszabályozót.
Ezenkívül bármilyen mechanikai igénybevétel szintén hasonló kérdéseket vethet fel. Ez az áramkör könnyedén legyőzi ezeket a szövődményeket. Az irányt és a sebességet egy magányos potenciométer segítségével manipulálják. A fazék meghatározott irányba történő forgatásával a motor elkezdi forogni.
Ha az edényt ellenkező irányba kapcsolja, a motor hátramenetben foroghat. Az edény középső pozíciója kikapcsolja a motort, biztosítva, hogy a motor először lelassuljon, majd leálljon, mielőtt erőfeszítéseket tesznek az irány megváltoztatására.
Műszaki adatok
Feszültség: Az áramkör és a motor a közös tápegységet használja. Ez azt jelenti, hogy mivel a LM324 32 VDC, ez szintén a motor működtetéséhez elérhető maximális feszültség lesz.
Jelenlegi: Az IRFZ44 MOSFET-et 49A-ra tervezték, az IRF4905 képes lesz kezelni a 74A-t. Mindazonáltal a MOSFET csapoktól a csavaros sorkapcsokig futó NYÁK-sávok kb. Ezt úgy lehetne javítani, hogy rézdrótdarabokat forrasztanak a NYÁK sínekre.
Ebben az esetben ügyeljen arra, hogy a MOSFET-ek ne legyenek túl forrók - ha igen, akkor nagyobb hűtőbordákat kell felszerelni ezekre az eszközökre.
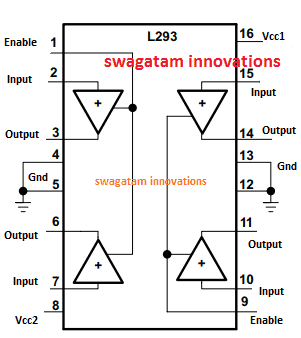
LM324 Pinouts

Az LM324-et használó egyenáramú motorok kétirányú ellenőrzése
Alapvetően 3 módot talál állítsa be az egyenáramú motorok fordulatszámát :
1. Gépesített fogaskerekek segítségével az ideális gyorsulás: Ez a megközelítés gyakran meghaladja az otthoni műhelyekben gyakorló rajongók többségének kényelmét.
két. A motor feszültségének csökkentése soros ellenállással. Ez minden bizonnyal nem hatékony (az ellenállásban a teljesítmény elvész), és a nyomaték csökkenését is eredményezheti.
A motor által felhasznált áram is növekszik, amikor a motor terhelése növekszik. A megnövekedett áram nagyobb feszültségesést jelent a soros ellenállás felett, és ezért csökken a motor feszültsége.
Ezután a motor erőfeszítést tesz még nagyobb áramra, ami a motor leállását okozza.
3. A motor teljes tápfeszültségének rövid impulzusokkal történő alkalmazásával: Ez a módszer megszabadul a sorozatleesési hatástól. Ezt impulzusszélesség-modulációnak (PWM) nevezik, és ez a stratégia található ebben az áramkörben. A gyors impulzusok lehetővé teszik, hogy a motor lassan, hosszabb impulzusokkal működjön.

HOGYAN MŰKÖDIK (lásd a vázlatot)
Az áramkört négy szakaszra lehet osztani:
1. Motorvezérlés - IC1: A
2. Háromszög hullámgenerátor - IC1: B
3. Feszültség-komparátorok - IC1: C és D
4. Motoros hajtás - Q3-6
Kezdjük a motorvezető szakaszával, a Q3-6 MOSFET köré összpontosítva. Ezen MOSFET-ekből csak néhány marad aktív állapotban bármely pillanatban. Amíg a Q3 és Q6 BE állapotban van, az áram a motoron keresztül mozog, és egyetlen irányba forog.
Amint a Q4 és Q5 üzemállapotban van, az áramforgalom megfordul, és a motor ellentétes irányba kezd forogni. IC1: C és IC1: D foglalkozik azzal, hogy a MOSFET-ek be vannak-e kapcsolva.
Az IC1: C és IC1: D opampokat feszültség-komparátorokként vezetik be. Ezeknek az opampoknak a referenciafeszültségét az R6, R7 és R8 ellenállás-feszültségosztó hozza létre.
Figyeljük meg, hogy az IC1: D referenciafeszültsége a „+” bemenethez van csatlakoztatva, de az IC1: C esetén a „-” bemenethez.
Ez azt jelenti, hogy az IC1: D a referenciájánál magasabb feszültséggel aktiválódik, míg az IC1: C referenciájánál alacsonyabb feszültséggel. Az Opamp IC1: B háromszög hullámgenerátorként van konfigurálva, és az aktiválási jelet a megfelelő feszültség-komparátorokhoz továbbítja.
A frekvencia nagyjából az R5 és C1 - 270Hz időállandó fordítottja az alkalmazott értékekre.
Az R5 vagy C1 csökkenése megnöveli a frekvenciát, és ezek növekedése csökkenti a frekvenciát. A háromszög hullám csúcs-csúcs kimeneti szintje sokkal kisebb, mint a két feszültségreferencia közötti különbség.
Ezért rendkívül nehéz mindkét összehasonlítót egyszerre aktiválni. Vagy különben mind a 4 MOSFET elkezdene vezetni, ami rövidzárlathoz vezet és tönkreteszi mindet.
A háromszög hullámalakja egy egyenáramú offszet feszültség köré épül fel. Az eltolás feszültségének növelése vagy csökkentése megfelelően változtatja a háromszög hullámának impulzus helyzetét.
A háromszög hullámának felfelé kapcsolása lehetővé teszi az IC1: D komparátor aktiválását a csökkenés aktiválásához az IC1: C összehasonlító aktiválását eredményezi. Ha a háromszög hullámának feszültségszintje a két feszültségreferencia közepén van, akkor egyik komparátor sem indukálódik. Az egyenáramú eltolódási feszültséget a P1 potenciométer szabályozza az IC1: A-n keresztül, amelyet feszültségkövetőnek terveztek.
Ez alacsony kimeneti impedanciafeszültség-forrást biztosít, lehetővé téve, hogy a DC-offszet feszültség kevésbé legyen érzékeny az IC1: B terhelési hatására.
Amint a „potot” kapcsoljuk, az egyenáram-eltolás feszültsége változni kezd, akár felfelé, akár lefelé a pot forgatásának iránya alapján. A D3 dióda fordított polaritásvédelmet nyújt a vezérlő számára.
Az R15 ellenállás és a C2 kondenzátor egyszerű aluláteresztő szűrő. Ez a MOSFET-ek által okozott feszültségcsúcsok megtisztítására szolgál, amikor bekapcsolják a motor tápfeszültségét.
Alkatrész lista

2) Kétirányú motorvezérlés az IC 556 segítségével
Az egyenáramú motorok sebességének és kétirányú vezérlésének megvalósítása viszonylag egyszerű. Az önállóan feszültség alatt álló motoroknál a fordulatszám elvileg a tápfeszültség lineáris függvénye. Az állandó mágneses motorok a független feszültségű motorok alkategóriája, és gyakran használják játékokban és modellekben.
Ebben az áramkörben a motor tápfeszültségét impulzusszélesség-modulációval (PWM) változtatják meg, amely biztosítja a jó hatásfokot, valamint a viszonylag nagy nyomatékot alacsony motorfordulatszám mellett. Egyetlen 0 és +10 V közötti vezérlőfeszültség lehetővé teszi a motor fordulatszámának megfordítását és a nullától a maximálisig történő változtatását mindkét irányban.
Az Astable multivibrator IC 80 Hz-es oszcillátorként van beállítva, és meghatározza a PWM jel frekvenciáját. A jelenlegi T1 forrás kb. A fűrészfog feszültségét ezen a kondenzátoron összehasonlítjuk az 1C2 vezérlőfeszültségével, amely a PWM jelet az N1-Na vagy az NPN1 pufferbe juttatja. A darlington-alapú motorvezérlő egy híd áramkör, amely legfeljebb 4 A terhelést képes meghajtani, feltéve, hogy a befutó áram 5 Am alatt marad, és a T1 -T tranzisztorok megfelelő hűtést biztosítanak. A D1, D5 diódák védelmet nyújtanak a motor induktív túlfeszültségei ellen. Az S1 kapcsoló lehetővé teszi a motor irányának azonnali megfordítását.

Képek prototípusa



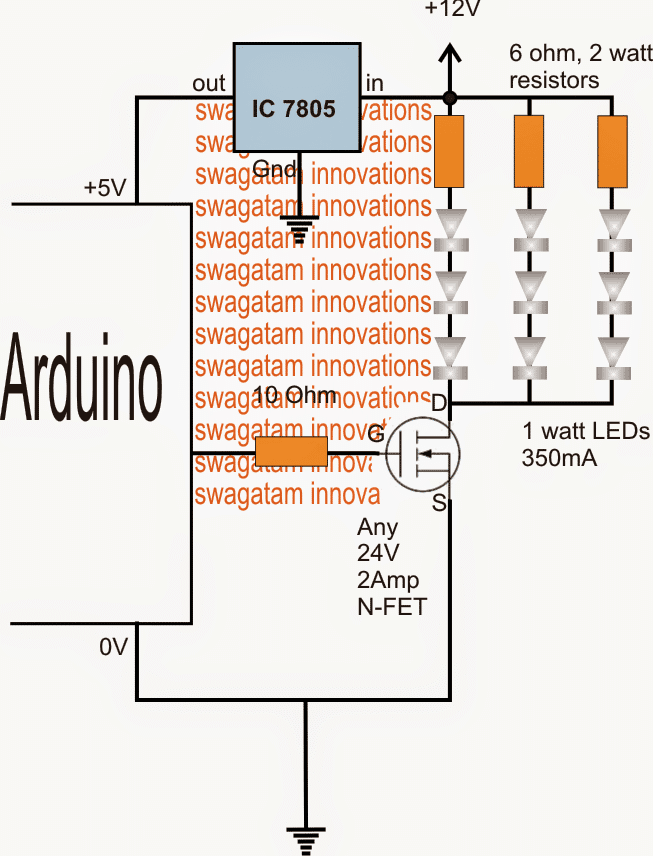
Előző: Az erősítő áramkörök megértése Következő: A tranzisztorok (BJT) és a MOSFET összekapcsolása az Arduino-val