Ebben a bejegyzésben megismerhetünk egy egyszerű áramkört, amely lehetővé teszi a kézi beállítás funkciót a motorkerékpár CDI-jének szikraidőzítéséhez, akár előre gyújtás, retardált gyújtás vagy egyszerűen normál időzített gyújtás elérése érdekében.
A témával kapcsolatos átfogó tanulmány után nyilvánvalóan sikeresen megterveztem ezt az áramkört, amelyet bármely motoros használhat a fokozott sebesség és az üzemanyag-hatékonyság elérésére a jármű motorjának gyújtási időzítésének kívánt beállításával, annak pillanatnyi sebességétől függően.
Gyújtási szikra időzítése
Mindannyian tudjuk, hogy a jármű motorjában keletkező gyújtószikra időzítése kulcsfontosságú az üzemanyag-hatékonyság, a motor élettartama és a jármű sebessége szempontjából, a rosszul időzített CDI-szikrák rosszul futó járművet eredményezhetnek, és fordítva.
Az égéstérben lévő szikra javasolt gyulladási ideje az, amikor a dugattyú körülbelül 10 fokos, miután átlépte a TDC (felső holtpont) pontot. A felvevő tekercs ennek megfelelően van beállítva, és minden alkalommal, amikor a dugattyú közvetlenül a TDC elé ér, a felvevő tekercs beindítja a CDI tekercset, hogy meggyújtja a szikrát, amelyet BTDC-nek neveznek (a felső holtpont előtt.
A fenti eljárással végzett égés általában jó motor-működést és károsanyag-kibocsátást eredményez.
A fentiek azonban csak addig működnek szépen, amíg a motor valamilyen ajánlott átlagsebességgel jár, de a rendkívüli sebesség elérésére tervezett motorkerékpároknál a fenti ötlet meghibásodik, és a motorkerékpár akadályozza a megadott nagy sebesség elérését.
Szikraidő szinkronizálása változó sebességgel
Ez azért történik, mert nagyobb sebességnél a dugattyú sokkal gyorsabban mozog, mint amire a gyújtó szikra számíthat. Bár a CDI áramkör helyesen indítja el az indítást, és megpróbálja kiegészíteni a dugattyú helyzetét, mire a szikra képes gyújtani a gyújtógyertyánál, a dugattyú már jóval a TDC előtt haladt, ami a motor nemkívánatos égési forgatókönyvét okozta. Ez viszont hatástalanságot eredményez, megakadályozva a motort a meghatározott magasabb sebességkorlátok elérésében.
Ennek érdekében a gyújtási idő korrigálása érdekében kissé elő kell mozdítanunk a gyújtógyertya égetését a CDI áramkör kissé előrehaladott ravaszának parancsolásával, és lassabb sebességeknél ezt egyszerűen meg kell fordítani, és az égést lehetőleg kissé késleltetni kell optimális hatékonyságot biztosítva a jármű motorja számára.
Mindezeket a paramétereket nagyon részletesen megvitatjuk egy másik cikkben, jelenleg azt a módszert szeretnénk elemezni, amely lehetővé tenné számunkra a gyújtási szikra időzítésének manuális beállítását, hogy haladjunk, lassítsunk vagy normálisan működjünk a sebességnek megfelelően a motorkerékpár.
Előfordulhat, hogy az átvétel időzítése nem elég megbízható
A fenti megbeszélésből arra a következtetésre juthatunk, hogy a hangszedő tekercs kioldódása nem csak megbízhatóvá válik a nagy sebességű motorkerékpárok számára, és a hangjelző továbbításának egyes eszközei elengedhetetlenné válnak.
Általában ezt mikrovezérlőkkel végzik, igyekeztem ugyanezt elérni hétköznapi alkatrészek segítségével, nyilván logikailag kivitelezhetőnek tűnik, bár csak gyakorlati teszt igazolja a használhatóságát.

Elektronikus CDI Advance Retard processzor tervezése
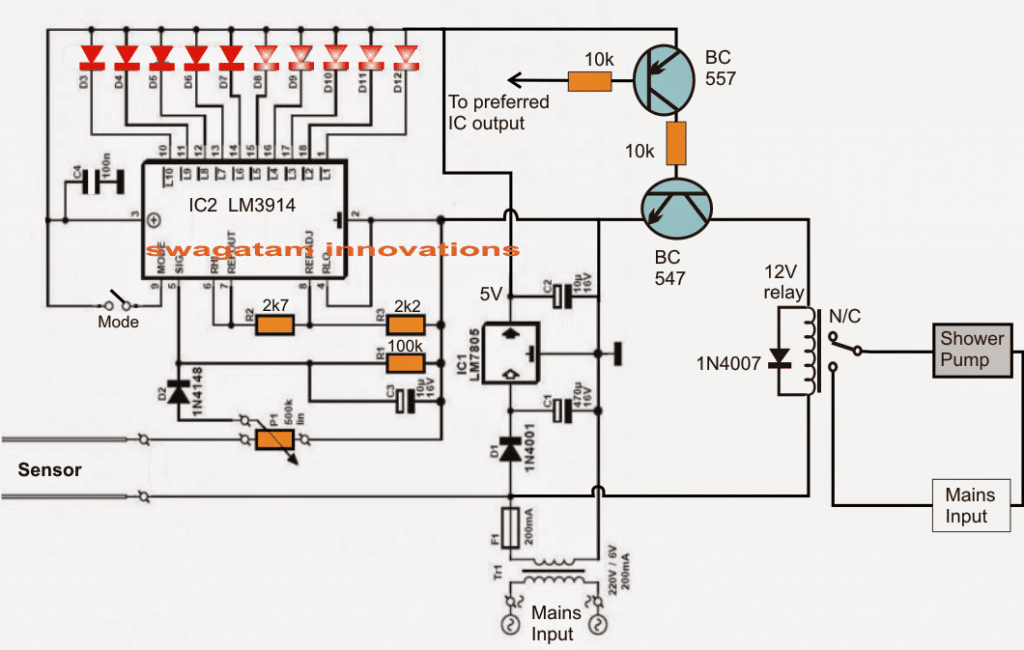
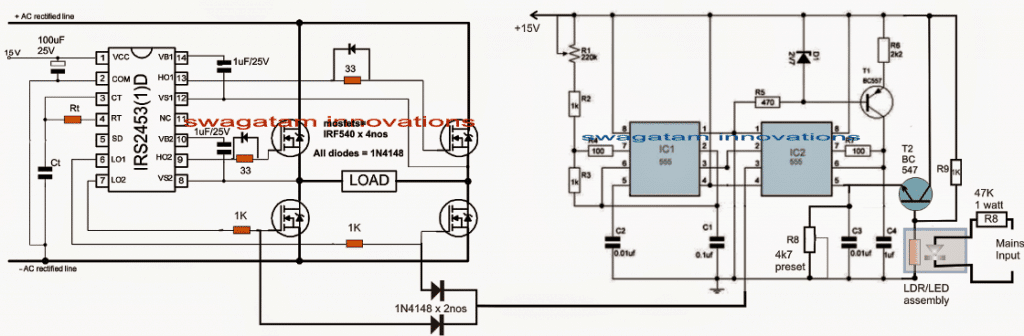
A javasolt beállítható CDI szikraelõzõ és késleltetett idõzítõ áramkör fenti tervére hivatkozva láthatunk egy közönséges IC 555 és egy IC 4017 áramkört, amelyek egy szabványban vannak elrendezve. ' LED üldöző fény áramkör 'mód.
Az IC 555 úgy van beállítva, mint egy lenyűgöző, amely órajel-impulzusokat állít elő és táplál az IC 4017 14. számú érintkezőjébe, amely viszont reagál ezekre az impulzusokra, és a kimeneti tűkön át „ugró” magas logikát produkál a # 3-as és 11-es tűtől kezdve majd vissza a 3. számú csaphoz.
Az ábra bal oldalán látható néhány NPN / PNP BJT, ezek úgy vannak elhelyezve, hogy a két IC-t alaphelyzetbe állítsák, reagálva a motorkerékpárok felvevőtekercséről kapott jelekre.
A felvevő tekercs jelet az NPN aljához vezetik, amely arra kéri az IC-ket, hogy állítsák vissza és indítsák újra az oszcillációkat, valahányszor a felszedő tekercs érzékeli a kapcsolódó lendkerék teljes fordulatát.
Az IC 555 frekvencia optimalizálása
Most az IC 555 frekvenciát úgy állítják be, hogy mire a felszedő tekercs egy fordulatot észlel és visszaállítja az IC-ket, az 555 IC körülbelül 9-10 impulzust képes előállítani, lehetővé téve az IC 4017 számára, hogy a 11-es tűig magasan álljon, vagy legalább a 9. számú pinoutig.
A fentiek a motor alapjárati fordulatszámának megfelelő fordulatszámra állíthatók be.
Ez azt jelenti, hogy alapjárati fordulatszámon a felszedő tekercsjelek lehetővé teszik a 4017 kimenetek számára, hogy szinte az összes pinouton áthaladjanak, amíg vissza nem áll a 3. számú csapra.
Most azonban próbáljuk meg szimulálni, hogy mi történne nagyobb sebességgel.
Válasz nagyobb járműsebesség mellett
Nagyobb sebességnél a felvételi jelek gyorsabb jeleket produkálnának, mint a normál beállítás, és ez viszont megakadályozná az IC 555-et abban, hogy előállítsa a meghatározott 10 impulzust, így lehet, hogy most képes lenne mondjuk 7 impulzus vagy 6 impulzus generálására nagyobb sebességgel.
Ez viszont megakadályozná az IC 4017-et abban, hogy az összes kimenete magas legyen, ehelyett most csak a # 6-os vagy az 5-ös érintkezőig képes vezetni, ezután a hangszedő az IC-t visszaállásra kényszeríti.
A lendkerék felosztása 10 előre / retard részre
A fenti megbeszélésből szimulálhatunk egy olyan helyzetet, amikor alapjáraton a 4017 IC kimenetei felosztják a felszedő lendkerék forgását 10 részre, ahol az alsó 3 vagy 4 tűs jelet úgy tekinthetjük, hogy azok megfelelnek a jeleknek, amelyek lehetnek közvetlenül a tényleges felszedőtekercs kiváltó jel előtt fordul elő, hasonlóan a # 2,4,7 tűs pinout magas logikáját szimulálhatjuk, hogy azok a jelek jelennek meg, amelyek közvetlenül a tényleges felszedőtekercs kiváltásának elmúlása után jelennek meg.
Ezért feltételezhetjük, hogy az IC 4017 alsó érintkezőin lévő jelek 'előremozdítják' a tényleges hangjeleket.
Továbbá, mivel a hangszedőről való visszaállítás a magasba emeli az IC 4017-et a # 3-as csapjáig, feltételezhetjük, hogy ez a csatlakozó megfelel a pickup normál 'ajánlott' triggerjének .... míg a # 3-as csapot követő pinouts feltételezhetõ, hogy a késleltetett jeleknek megfelelõ jelek vagy a késleltetett jeleknek megfelelõ jelek, a tényleges felvételi kiváltó tényezõkhöz viszonyítva.
Az áramkör beállítása
Ehhez először meg kell ismernünk azt az időt, amelyre a felvevő jelnek szüksége van az egyes alternatív impulzusok előállításához.
Tegyük fel, hogy 100 milliszekundum körüli értékre rögzíti (tetszőleges érték), ez azt jelentené, hogy az 555 IC-nek 100/9 = 11,11 ms sebességgel kell impulzusokat előállítania a # 3-as tűnél.
Ha ez be van állítva, akkor feltételezhetjük, hogy a 4017 kimenetei minden kimenetén magas logikát produkálnak, ami fokozatosan „visszahúzódik”, mivel a hangjelek a jármű sebességére reagálva egyre gyorsabbak lesznek.
Ez visszahúzódó „magas” logikát indukálna az IC 4017 alsó fenékvezetékein, ezért nagyobb sebességgel a versenyzőnek lehetősége nyílik arra, hogy manuálisan igénybe vegye az alsó csapok készletét a CDI tekercs beindításához, amint azt az ábra mutatja (lásd: választókapcsoló opciók).
Az ábrán egy választókapcsolót láthatunk, amellyel kiválaszthatjuk az IC 4017 IC-ből a pinout triggereket a CDI tekercs kiváltásához.
Amint azt a fentiekben kifejtettük, a kiválasztott alsó visszahúzódó logikák halmaza lehetővé tenné a CDI tekercs előreindítását és ezáltal lehetővé tenné a versenyző számára, hogy a CDI tekercs önbeállító automatikus előgyújtását érje el, de ezt csak akkor kell kiválasztani, ha a jármű jóval meghaladja az ajánlott normál sebességet.
Ugyanígy, ha a versenyző alacsonyabb sebességet fontolgat a járműnél, akkor a kapcsolót átkapcsolhatja a „retarded” időzítési opció kiválasztására, amely az IC 4017 3. sz.
Az ajánlott normál sebesség alatt a motoros kiválaszthatja a 3-as csapot a CDI kiváltó kimeneteként, amely lehetővé teszi a jármű számára, hogy az adott normál sebességgel hatékonyan közlekedhessen.
A fenti előre / retard időzítés elméletét a következő videóban kifejtett magyarázat ihlette:
Az eredeti videó link, amely a Youtube-on megtekinthető, az alábbiakban található:
Hogyan lehet automatizálni a fenti koncepciót
A következő részben megtanuljuk a fenti koncepció automatikus változatra történő frissítésének módszerét egy fordulatszámmérő és egy opamp áramkör szakaszai segítségével. Az ötletet Mr. Mike kérte, Mr. Abu-Hafss tervezte.
Műszaki adatok
Üdvözlet!
Érdekes dolgok itt, jelenleg nyomokat raktam a CAD-re, és szeretném ezt bevésni néhány NYÁK-ra, de inkább az előre gyártott szabványt vagy a retardot választanám az elektronikára ...
Kicsit új vagyok ebben, de úgy érzem, mintha nagyon jól megérteném a játszott fogalmakat ...
a kérdésem az, hogy vannak-e cikkei az előválasztás automatizálásáról a motor fordulatszáma alapján? ja és a különféle alkatrészek alkatrészlistája látványos lenne ???
Köszönöm, Mike
A tervezés, Abu-Hafss
Szia Swagatam
A cikkre hivatkozva előre, késleltesse a CDI-t a nagy sebességű motorkerékpárok hatékonyságának növelése érdekében , Szeretném megjegyezni, hogy még nem találkoztam olyan helyzettel, amelyben a szikrák kilövésének visszafizetése (pontosabban KÉSLELTETÉS) szükséges. Mint említetted, többnyire a kerékpárok (versenybiciklik) nem képesek teljesíteni nagy fordulatszámon (általában 10 000 fordulat / perc felett), ezért előzetes szikrázásra van szükség. Majdnem ugyanaz az ötlet jutott eszembe, de nem tudtam fizikailag tesztelni.
Az alábbiakban javasoltam az áramkörét:
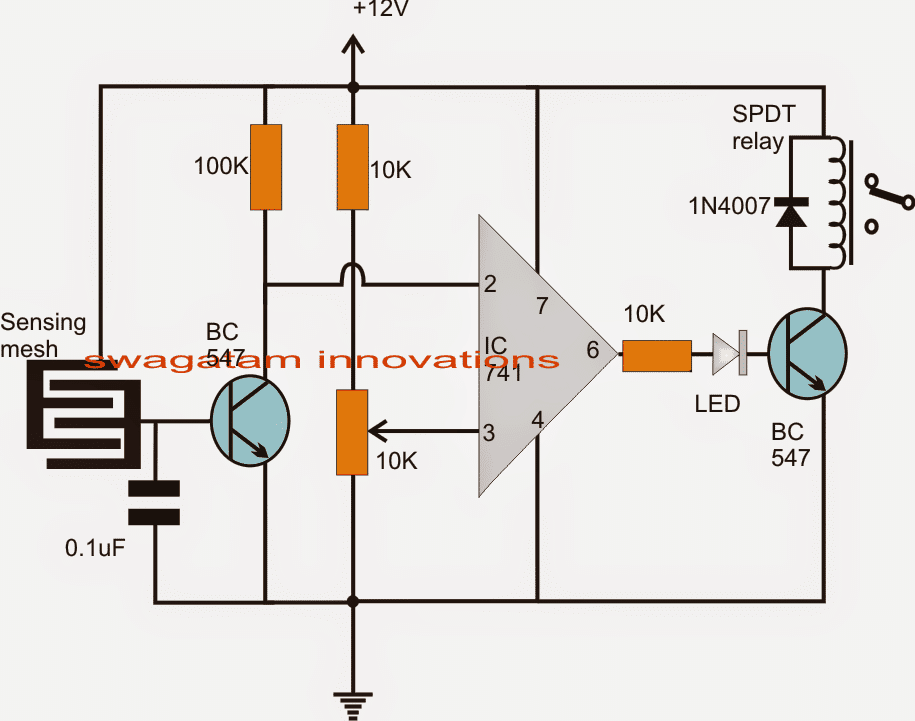
A tüzelő szikra NORMAL és ADVANCE közötti kapcsolásának automatizálásához a fordulatszámmérő áramkör még néhány alkatrésszel használható. A fordulatszámmérő áramkör voltmérőjét eltávolítják, és a kimenetet az IC LM741 IC 2. számú érintkezőjébe táplálják, amelyet komparátorként használnak. 10 V referenciafeszültséget rendelnek a 3. érintkezőhöz. A fordulatszámmérő áramkört úgy tervezték, hogy 1V kimenetet adjon 1000RPM-mel szemben, így a 10V 10 000RMM-re utal. Ha az RPM meghaladja a 10 000 értéket, akkor a # 2 tű több mint 10 V, ezért a 741 kimenete alacsony (nulla) lesz.
Ez a kimenet a T2 aljához van csatlakoztatva, ezért alacsony kimeneti kapcsolók vannak a T2-n. Ha az RPM értéke 10 000 alatt van, a kimenet magasra megy, és ezért a T2 kikapcsol. Ugyanakkor a jel invertereként konfigurált T4 alacsonyra inverzálja a kimenetet, és ugyanez csatlakozik a T3 aljzatához, így a T3 be van kapcsolva.
Üdvözlettel
Abu-Hafss

Előző: Hogyan szerezhetünk ingyen energiát egy ingából Következő: 3.3V, 5V feszültségszabályozó áramkör készítése diódákkal és tranzisztorokkal