A cikk bemutat egy egyszerű elektromos robogó áramkört, amely szintén módosítható elektromos automatikus riksa készítéséhez. Az ötletet Steve úr kérte.
Az áramköri kérelem
Nagy szerencsém volt megtalálni a blogját, igazán csodálatos dolgokat, amelyeket sikerült megterveznie.
Keresek egy DC-től DC fokozásig és elektromos robogó motor vezérlője
Bemenet: SLA (lezárt ólom-sav) 12V-os akkumulátor, amely ~ 13,5V-ot tölt
minimális feszültség - ~ 10,5 V-nál le kell kapcsolni
Kimenet: 60V DC motor 1000W.
Találkozott már ilyen áramkörrel?
El tudom képzelni, hogy push-pull típusú lesz, de fogalmam sincs a mosfet típusokról (adja meg a teljesítményét 80-100A), azok meghajtásáról, majd a transzformátorról, a mag típusáról, majd a diódákról.
Plusz a minimális feszültség, amely lekapcsolja a PWM munkaciklusát.
Találtam még néhány információt. A motor 3 fázisú, kefe nélküli, hallérzékelőkkel.
Kétféleképpen lehet megközelíteni: a / hagyja a meglévő vezérlőt a helyén, és csak 12V-60V-ot lépjen fel, vagy b / cserélje le a vezérlőt is.
Nem lesz különbség az energiahatékonyságban, a vezérlő egyszerűen kapcsolja, hogy melyik fázis kap áramot a hall-érzékelők alapján. Ezért ragaszkodni a tervhez a.
Nagyon szépen köszönjük,
Steve

A dizájn
Ma egy elektromos jármű gyártása sokkal könnyebb, mint korábban, és ez a tervezés két fő elemének, nevezetesen a BLDC motoroknak és a Li-ion vagy a Li-polimer akkumulátoroknak köszönhetően vált lehetővé.
Ez a két rendkívül hatékony tag alapvetően lehetővé tette, hogy az elektromos járművek koncepciója valósággá váljon és gyakorlatilag megvalósítható legyen.
Miért éppen a BLDC Motor
A BLDC motor vagy a kefe nélküli motor hatékony, mivel úgy tervezték, hogy fizikai érintkezés nélkül működjön, kivéve a tengely golyóscsapágyait.
A BLDC motorokban a forgórész kizárólag mágneses erővel forog, ami rendkívül hatékonnyá teszi a rendszert, ellentétben a korábbi kefés motorokkal, amelyek rotorjai a tápforrással voltak összekötve kefékkel, ami sok súrlódást, szikrát és kopást okozott a rendszerben.
Miért Li-Ion akkumulátor
Hasonló vonalakon a sokat korszerűsített Li-ion akkumulátorok és a Lipo akkumulátorok megjelenésével ma már nem tekintjük nem hatékony fogalomnak az akkumulátorokból történő villamos energia elérését.
Korábban csak az ólom-savas akkumulátorok álltak rendelkezésünkre az összes DC-tartalék rendszerhez, amelyek két fő hátránnyal jártak: Ezeknek a társaiknak sok időre volt szükségük a töltéshez, korlátozott kisütési sebességgel, alacsonyabb élettartammal, terjedelmes és nehézségekkel, mindezek csak hozzáadódtak munkájuk nem hatékony jellegére.
Ezzel ellentétben a Li-ion vagy Li-po akkumulátorok könnyebbek, kompaktak, gyorsan feltölthetők nagy áramerősség mellett, és bármilyen kívánt magas áramerősség mellett lemeríthetők, ezek hosszabb élettartammal rendelkeznek, SMF típusúak, és mindezek a tulajdonságok megfelelő jelölt olyan alkalmazásokhoz, mint elektromos robogók, elektromos riksa, quadcopter drónok stb.
Habár a BLDC motorok rendkívül hatékonyak, ezekhez speciális IC-k szükségesek az állórész tekercsük vezetéséhez, ma már sok gyártó gyártja ezeket az exkluzív, következő generációs IC modulokat, amelyek nemcsak a motorok működtetésének alapvető funkcióját látják el, hanem számos speciális fejlett funkcióval is rendelkeznek. olyan funkciók, mint: PWM nyitott hurok vezérlés, érzékelővel támogatott zárt hurok vezérlés, több bolondbiztos védelem, motor hátramenet / előre irányítás, fékvezérlés és számos más korszerű beépített funkció.
BLDC meghajtó áramkör használata
Korábbi bejegyzésemben már említettem egy ilyen kiváló chipet, amelyet kifejezetten nagy teljesítményű BLDC motorok kezelésére terveztek, ez a Motorola MC33035 IC-je.
Tanuljuk meg, hogyan lehet ezt a modult hatékonyan megvalósítani elektromos robogó vagy elektromos riksa készítéséhez közvetlenül otthonában.
Nem a jármű mechanikai részleteiről, hanem csak az elektromos áramkörről és a rendszer bekötésének részleteiről fogok tárgyalni.
Kördiagramm

Alkatrész lista
Minden ellenállás, beleértve az Rt-t is, az Rs és R = 4k7 kivételével, 1/4 watt
Ct = 10nF
Fordulatszám-potenciométer = 10K lineáris
Felső teljesítményű BJT-k = TIP147
Alsó Mosfets = IRF540
Rs = 0,1 / max. Állórész áramkapacitása
R = 1K
C = 0,1 uF
A fenti ábra egy teljes értékű, nagy teljesítményű, kefe nélküli háromfázisú DC motoros IC MC33035 meghajtót mutat, amely tökéletesen alkalmassá válik a javasolt elektromos robogó vagy elektromos riksa alkalmazásra.
Az eszköz rendelkezik minden alapvető funkcióval, amely várhatóan ezekben a járművekben lesz, és szükség esetén az IC-t további fejlett funkciókkal lehet fejleszteni számos alternatív konfiguráció révén.
A speciális funkciók kifejezetten lehetővé válnak, ha a chipet zárt hurkú üzemmódban konfigurálják, azonban a tárgyalt alkalmazás egy nyílt hurkú konfiguráció, amely előnyösebb konfiguráció, mivel konfigurálása sokkal egyszerűbb, és mégis képes teljesíteni az összes szükséges funkciót ami egy elektromos járműben várható.
Már megbeszéltük ennek a chipnek a kihúzási funkciói az előző fejezetben foglaljuk össze ugyanezt és értjük meg azt is, hogy pontosan hogyan lehet a fenti IC-t megvalósítani az elektromos járművel kapcsolatos különféle műveletek végrehajtásához.
Az IC működése
A zöld árnyékolt rész maga az MC 33035 IC, amely megmutatja az összes beépített, kifinomult áramkört a chipbe ágyazva, és mitől olyan fejlett a teljesítményével.
A sárga árnyékolt rész a motor, amely tartalmaz egy háromfázisú állórészt, amelyet a 'Delta' konfigurációban lévő három tekercs jelöl, az N / S pólusú mágnesekkel jelölt kör alakú rotort és a tetején három Hall effektus-érzékelőt.
A három Hall effektus-érzékelő jeleit az IC 4, 5, 6 érintkezőihez vezetik a belső feldolgozáshoz és a megfelelő kimeneti kapcsolási szekvencia előállításához a csatlakoztatott kimeneti energiaeszközökön.
Pinout funkciók és vezérlők
A 2., 1. és 24. csatlakozó a külső konfigurációjú felső teljesítményű eszközöket vezérli, míg a 19, 20, 21 csapok a kiegészítő, alacsonyabb sorozatú tápegységek vezérlésére vannak kijelölve. amelyek együttesen vezérlik a csatlakoztatott BLDC autómotort a különböző betáplált parancsok szerint.
Mivel az IC nyitott hurkú üzemmódban van konfigurálva, állítólag külső PWM jelek segítségével kell aktiválni és vezérelni, amelyeknek a munkaciklusa állítólag meghatározza a motor fordulatszámát.
Ez az intelligens IC azonban nem igényel külső áramkört a PWM-ek előállításához, inkább beépített oszcillátor és pár hibaerősítő áramkör kezeli.
Az Rt és a Ct komponensek megfelelően vannak kiválasztva a PWM-ek frekvenciájának (20-30 kHz) előállításához, amelyet az IC 10. számú érintkezőjébe táplálnak további feldolgozás céljából.
A fentieket egy 5 V-os tápfeszültségen keresztül hajtja végre, amelyet maga az IC generál a 8. érintkezőnél. Ezt a tápfeszültséget egyidejűleg használják a Hall-effektusú készülékek táplálására, úgy tűnik, hogy itt minden pontosan megtörtént.
A pirossal árnyékolt rész alkotja a konfiguráció sebességszabályozási szakaszát, amint az látható, hogy egyszerűen egyetlen közönséges potenciométerrel készült .... felfelé tolva növeli a sebességet és fordítva. Ez pedig a PWM megfelelő változó munkaciklusain keresztül válik lehetővé az egész # 10, 11, 12, 13 tű .
A potenciométer átalakítható LDR / LED szerelési áramkörré az a elérése érdekében súrlódás nélküli pedálsebesség-szabályozás a járműben.
3. sz a motor forgásának előre, hátra irányának, vagy inkább a robogó vagy a riksa irányának meghatározására szolgál. Ez azt jelenti, hogy most az Ön elektromos robogója vagy elektromos riksa képes lesz hátramenetelni ... képzeljen csak el egy kétkerekűt, hátramenetben, érdekes?
3. sz kapcsolóval látható, ennek a kapcsolónak a bezárásával a 3-as csap a földre kerül, lehetővé téve a „előre” mozgást a motor felé, míg kinyitása a motor ellenkező irányú pörgését okozza (a 3-as csapnak van egy belső felhúzási ellenállása, így kinyílik a kapcsoló nem okoz semmi károsat az IC számára).
Ugyanígy a 22-es érintkező kapcsoló választja ki a csatlakoztatott motor fáziseltolásos jelválaszát, ezt a kapcsolót a motor specifikációira hivatkozva megfelelően be vagy ki kell kapcsolni, ha 60 fokos fázisú motort használnak, akkor a kapcsolónak zárva kell maradnia , és nyitott egy 120 fokos fázisú motor számára.
# 16-os tű az IC földelőcsapja, és csatlakoztatni kell az akkumulátor negatív vezetékéhez és / vagy a rendszerhez tartozó közös földvezetékhez.
17. sz. Tű a Vcc, vagy a pozitív bemeneti tű, ezt a csapot 10 V és 30 V közötti tápfeszültséghez kell csatlakoztatni, 10 V a minimális érték és 30 V a maximális meghibásodási határ az IC számára.
17. sz. Tű integrálható a „Vm” -be vagy a motor tápvezetékébe, ha a motorellátás specifikációi megegyeznek az IC Vcc specifikációival, ellenkező esetben a 17-es érintkező egy különálló fokozatú szabályozó fokozatból szállítható.
# 7 tű az IC engedélyezése, ezt a csapot egy kapcsolón keresztül a földdel le lehet zárni, mindaddig, amíg BE van kapcsolva, és a # 7 érintkező földelve marad, a motor bekapcsolt állapotban maradhat, a motor le van tiltva, ami a motort partra emeli, míg végül leáll. A haladási üzemmód gyorsan leállhat, ha a motor vagy a jármű valamilyen terhelés alatt áll.
# 23. tű „fékezési” képességgel rendelkezik, és a motor szinte azonnal leáll és leáll, amikor a hozzá tartozó kapcsolót kinyitják. A motor normálisan járhat, amíg ezt a kapcsolót zárva tartják, és a # 7 csapot földelt állapotban tartják.
Azt javaslom, hogy kapcsolja be a kapcsolót a # 7-es (engedélyezés) és a 23-as (fék) csapon, hogy ezeket kettős működéssel kapcsolják össze, és ez valószínűleg segít hatékonyan és együttesen „megölni” a motor forgását és azt is lehetővé teszi, hogy a motor a két pnout kombinált jelével működjön.
Az „R” képezi az érzékelő ellenállást, amely ilyen esetekben felelős a motor túlterhelésének vagy túlfeszültségének ellenőrzéséért. a „hiba” állapot azonnal bekapcsol, ha azonnal kikapcsolja a motort, és az IC belső kikapcsolási módba kapcsol. Az állapot addig marad ebben az üzemmódban, amíg a hibát ki nem javítják és a normális állapot helyre nem áll.
Ezzel befejezzük a javasolt elektromos robogó / riksa vezérlőmodul csavarjainak különféle kivezetéseivel kapcsolatos részletes magyarázatot. A jármű működésének sikeres és biztonságos végrehajtása érdekében csak megfelelően kell végrehajtani, a diagramban bemutatott csatlakozási információk szerint.
Ezenkívül az IC MC33035 tartalmaz egy pár beépített védelmi funkciót, például az alacsony feszültségű zárat, amely biztosítja a jármű kikapcsolását, ha abban az esetben, ha az IC-t a szükséges minimális tápfeszültségtől gátolják, és egy hővédő túlterhelés elleni védelmet is biztosít hogy az IC soha nem működik túlmelegedéssel.
Az akkumulátor (tápegység) csatlakoztatása
A kérésnek megfelelően az elektromos jármű meg van határozva, hogy 60 V-os bemenettel működjön, és a felhasználó kéri a boost konverter ennek a magasabb feszültségszintnek a megszerzéséhez egy kisebb 12 V-os vagy 24 V-os akkumulátorból.
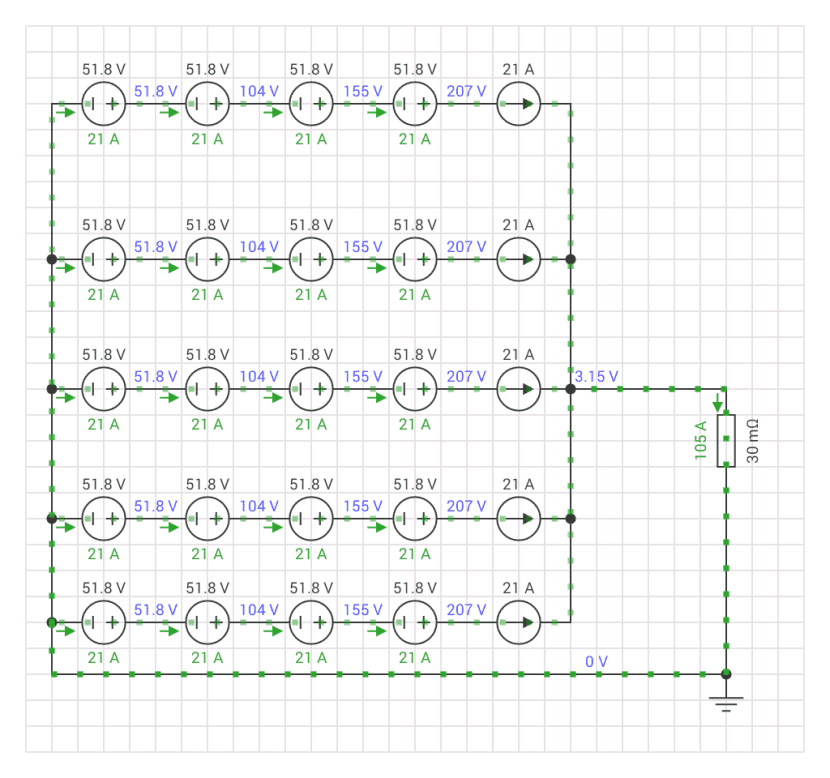
A boost konverter hozzáadása azonban szükségtelenül összetettebbé teheti az áramkört, és növelheti az esetleges hatékonyságot. A jobb ötlet az, hogy 5nos 12 V-os akkumulátort sorozatosan használjunk. Az 1000 wattos motor elegendő biztonsági ideje és áramának biztosítása érdekében az egyes akkumulátorok névleges értéke 25AH vagy annál nagyobb.
Az elemek bekötése a következő csatlakozási részletekre támaszkodva valósítható meg:

Előző: Nagy teljesítményű, kefe nélküli motorvezérlő áramkör Következő: Hogyan működnek a Boost átalakítók