A bejegyzés átfogóan tárgyalja az alap Arduino kód bevezetési útmutatót a fedélzeti LED villogására. Az adatokat Jack Franko készítette, tesztelte és írta.

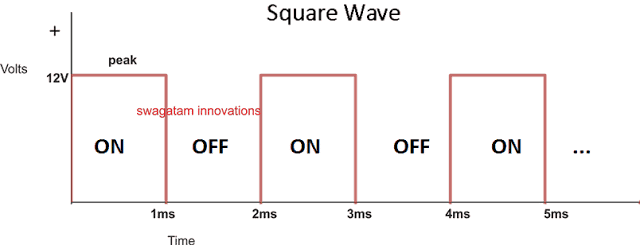
KÓD: az ARDUINO BOARD 13. érintkezőjén található, egyszerűen beépített LED-hez alapértelmezés szerint 50 millimásodpercenként villogni kell, mivel a leírásban aszimmetikusan (milliszekundumban) fogják megadni.
/ * első egyszerű
Program Arudinón JACKFRANKO * /
int l = 13
//where l is pin 13void setup(){ pinMode
(l,OUTPUT) }void loop() { digitalWrite
(l,HIGH) delay(50) digitalWrite
(l,LOW) delay(50)}
Megjegyzés: Mivel egy Arduino UNO R3 Board Programing programot tanulmányozunk, ha Ön nem programozó, tervező vagy hobbi, diákként az alapoktól kell kezdeni.
Az első dolog az, hogy megértsük az Arduino Uno R3-t egy online boltokban kapható készlet beszerzésével.
Leírás:
mivel hagyomány szerint a nevünk megkapása, mielőtt a program elindulna, jó ötlet, itt van az első alapprogramom, amely fentebb le lett írva, ezzel a jellel / * kezdődött, és a név szövegével, valamint az összes olyan dologgal, amelyet be akarsz írni közé * A / az nem befolyásolja a programot, és nem része a programnak, mert az Arduino programfordító tudja, hogy a “/ *, * /“ jelölés közötti cuccoknak ki kell ugraniuk, csak a program címe.
/ * első egyszerű
Program az Arudinón JACKFRANKO BY / Next Line int l = 13
// ahol l a 13. tű
Ez a program egy Deklaráció része, ahol az egész számot az „int“ paranccsal deklaráljuk, majd egy kis L ábécét követünk, amely egyenlő 13-tal és pontosvesszővel végződik, majd kettős perjel „//” és némi szöveg után.
Itt megadtuk az „int” parancsot, amelyet általában egésznek és kicsi L-nek mondunk, amely egyenlő 13-val, és pontosvesszővel végeztünk. Itt azt mondtuk a fordítónak, hogy az „l” értéke egyenlő 13-mal, amely a 1. sz. tizenhárom az arduino táblán, itt az „l” csak egy érték, amelyet a 13. sz. tűhöz jelölünk, hogy az „l” nem a fordító bármely funkciója vagy szkriptje, nekünk kell egy kicsit barátságossá tenni a kódot, amelyet az „l” ez a projekt a LED rövidítése.
Szeretném kicsit kisebb kódot készíteni és helyet spórolni. Ezen a ponton, ha nem akarod „l” -ként megtartani, akkor mondd, hogy meg akarod tartani pl. „Én” -nek, akkor az egész kódban, ahol valaha is van „l”, különben meg kell változtatnod „én” -ként a fordító nem fog működni, és hibát fog adni.
Ez a kijelentés a második részből áll, amelyet „//” követ, és néhány szöveget itt meg kell értenünk, hogy bármit is állít a „//” a nyitáskor, és nem volt zárva, a fordító nem fogja elolvasni ezt az állítást. Lehet több sorban bezárás nélkül. Ez azért van, hogy a megértéshez kódban adjunk némi hivatkozást és megjegyzéseket.
Mielőtt megértenénk a kód többi részét, meg kell értenünk a kód alapvető funkcióit, amelyek a „void setup” és az „void loop” itt vannak, ez a két funkció nagyon fontos, mert deklarálni fogjuk az INPUT, OUTPUT és milyen típusú munkát által végzett benne. kezdjük tehát az érvénytelen beállítással, ez a kód egy része, ahol meg fogjuk adni az INPUTS & OUTPUTS-t, amelyeknek egyszer futtatniuk kell a projektünket. Itt csak egy kimenetről fogunk beszélni a kódunk szerint.
A Másik funkció void hurok a kód második része, amely ciklus formájában fog futni. itt ez a két funkció abból áll, hogy a görbe zárójel nyitva és zárva, majd a nyitott zárójel után valamilyen kódot és zárójelet tart. A következő programban adok információkat ezekről a zárójelekről. itt a göndör zárójelekre kell összpontosítanunk, ahol van néhány kód zárva ezek közé a zárójelek közé.
void setup(){ pinMode
(l,OUTPUT) }
Itt megadtuk azt a függvényt, amelynek egyszer futtatnia kell projektünket, és ezt kimenetként. ha észrevette, hogy göndör zárójelbe írtuk kódunkat, ahol deklaráltuk, hogy a pinMode l görbe zárójelben jelenik meg, és pontosvesszővel végződik,
itt pinMode az l egész számra OUTPUT-ként kijelölt függvény.
Ezért az l-t kijelölik a 13-as tűhöz az arduino fordítóban, és megérti, hogy a 13-as tűt l-nek hívják, és l a 13-as tűnek, ha a 13-at az l helyére tesszük a PinMode függvény után
kimenetként mind a 13, mind az l-t figyelembe veszi.
ha töröljük az int l = 13 értéket, akkor nem veszi figyelembe az l ábécét, és hibát ad. Itt volt a pin
nem 13, amely l-es ábécé, mint kimenet, mindig nagybetűvel írják, mint OUTPUT, és a pinmode funkciót pinMode-ban írják, kis betűvel kezdve, szóköz nélkül, más szómód nagybetűvel kezdődik, amelyet a fordító megért, ami a kis- és nagybetűket is érzékeli.
Ezután a program ciklus módjára jutunk, itt megadjuk mindazt a függvényt, amelynek ciklusban kell futnia
korlátlan ideig.
void loop() { digitalWrite
(l,HIGH) delay(50) digitalWrite
(l,LOW) delay(50)}
Itt a digitalWrite függvénnyel deklaráltuk az l egész számot HIGH értékre. Ez a digitalWrite állítás az l HIGH egész számot akkor jelenti, amikor TOVÁBB megfordul TOVÁBB 13-as tű az Arduino táblán, amint azt a 13-as tű l, amelyet vesszővel választunk el a görbe zárójelben.
Itt, miután elmondtuk azt a késleltetést (50), ez az állítás ms-ban (ezredmásodpercben) számolja az időt, ahol 1000 ms egyenlő 1 másodperccel. Ebben a programban azt akarom, hogy 20 másodperces villanásom legyen egy másodperces matematikai számítás során
adott egy 50-es értéket, amely zárójelben van feltüntetve.
Ez azt jelenti, hogy a hurok szakasz alatt az első sor bekapcsolja a LED -emet, amely a 13. tűnél található, és várjon 5 ms-ot. Ha nem adtunk további funkciót a hurok kikapcsolására a LED kikapcsolására, az továbbra is világít.
Bár ezt a késést 50 ms-ig mondtuk. Tehát parancsot adtunk a LED kikapcsolására
ban ben digitalWrite (l, LOW) , miután kijelentette ezt az állítást, a LED nem fog kikapcsolni, mert a hurok nélkül hiányos késés (50) először bekapcsoljuk a LED-t, majd várunk 50 ms-ot, majd kikapcsoljuk a led-et, majd 50 ms-ot várunk az egy hurok befejezéséhez, amely végtelenül fog játszani, amíg az Arduino be van kapcsolva. Be- és kikapcsolja a vezetéket a 2. sz
13 másodpercenként 20-szor.
Előző: SPDT szilárdtest-egyenáramú relé áramkör MOSFET segítségével Következő: Inkubátor hátrameneti motorvezérlő áramköre