Ebben a korszakban ipari automatizálás , a robotokat különböző folyamatok kezelésére használják a termelés pontos és jobb minősége érdekében. Az ideális motor kiválasztása a tökéletes robothoz mindig nehéz feladat, miközben a robotot különösen az ipar számára tervezik. A megfelelő kiválasztása elektromos motorok az ipari robotokban több paraméterre van szükség a kar irányításának, helyzetének, szögletes és lineáris mozgásának figyelembevételéhez.

Az ipari robotikában használt motorok
A motorválasztás a legkevésbé megértett koncepció a robotika hobbisták számára, amelyek stratégiát és komoly elemzést igényelnek. Ez magában foglalja a robot sebességének, gyorsulásának, nyomaték követelményeinek meghatározását a robot súlya, kerékmérete és alkalmazása alapján, ahol megvalósítani kell. Sokféle motor létezik. elérhetőek a mai piacon, de főleg Tiny pager motorok, szervomotorok , lineáris motorok, léptetőmotorok és az egyenáramú motorokat az ipari robotokban alkalmazási területüknek megfelelően használják.
A motor nem megfelelő kiválasztása egy fogyatékkal élő robothoz vezet, tehát milyen típusú motor a legalkalmasabb és alkalmas arra, hogy az ipari robotokat valósághűvé, pontosá és elegendővé tegye az összes ipari folyamat igényének kielégítésére, szem előtt tartva az összes reális előírást?
Itt összegyűjtöttük e motorok néhány betekintését az ipari szakemberektől az ipari alkalmazásokhoz kiválasztandó megfelelő motor kiválasztásához.
Javasoljuk, hogy kövesse azon szakértők véleményét, amelyek célja az ipari robotika legjobb motorjainak rendelkezésre álló DC, léptető, kefe nélküli és szervo motorok biztosítása a robot pontos, költséghatékony és megbízható mozgásához.
Ch.Sampath Kumar
M.tech a VLSI tervezésben
Műszaki tartalomíró
 Az egyenáramú motorok széles tartományban állnak rendelkezésre a folyamatos működéshez, de a megfelelő alkalmazáshoz megfelelő sebességfokozat-csökkentést igényel. A léptetőmotor nem igényel sebességfokozat-csökkentést, mivel fokozatos működése alacsony sebességet biztosít a meghatározott alkalmazásokhoz. Végül a szervomotorokat használják a pontos és pontos vezérléshez, amelyet zárt hurkú műveleteknél valósítanak meg. Ehhez azonban további visszacsatolásra és meghajtó áramkörre van szükség, így drága, mint az egyenáramú és a léptető motor. Tehát a szervomotorok pontos mozgása miatt megbízhatóbbá teszik a robotot.
Az egyenáramú motorok széles tartományban állnak rendelkezésre a folyamatos működéshez, de a megfelelő alkalmazáshoz megfelelő sebességfokozat-csökkentést igényel. A léptetőmotor nem igényel sebességfokozat-csökkentést, mivel fokozatos működése alacsony sebességet biztosít a meghatározott alkalmazásokhoz. Végül a szervomotorokat használják a pontos és pontos vezérléshez, amelyet zárt hurkú műveleteknél valósítanak meg. Ehhez azonban további visszacsatolásra és meghajtó áramkörre van szükség, így drága, mint az egyenáramú és a léptető motor. Tehát a szervomotorok pontos mozgása miatt megbízhatóbbá teszik a robotot.
Viswanath Prathap
M.Tech villamos energetikában
Műszaki tartalomíró

Kiválasztás és elhelyezés A robotokat általában az iparágakban találják meg, hogy kiválasszanak egy tárgyat egy pozícióból vagy helyről, és elhelyezzenek egy másik pozícióban vagy helyen. Ebből a célból a robotok ízületeinek szögmozgásait ellenőrizni kell, amely szervomotorok segítségével érhető el. Ezeket a szervomotorokat a robotvezérlő által a robotok ízületeinek működtetésére adott PWM adatok felhasználásával vezérlik. A szervomotorok elegendő nyomatékot képesek létrehozni ahhoz, hogy egy tárgy gyorsan megállási helyzetből mozogjon. Így ezeket kerékként használják katonai és ipari robotgépjárművekben. Léptetőmotorok is használhatók a helyzet szabályozására, de ezek a pihenőidő alatt is energiát fogyasztanak csak a reteszeléshez és a parancsolt helyzet megtartásához. Tehát a szervomotorokat általában az ipari robotikában használják a léptető motorok nagy teljesítményű helyettesítőjeként.
S. Naresh Reddy
M.tech a beágyazott rendszerben
Projekt útmutató
A mechanikus robot szerkezetét tökéletesen ellenőrizni kell  rm feladat. A robot vezérlésének három különböző fázisa van, például észlelés, feldolgozás és cselekvés. Az érzékelők információt adnak az ízületek helyzetéről és a végeffektorról a robotnak, majd ezeket az információkat feldolgozzák a vezérlőegységnek, és kiszámítják a megfelelő jelet a mechanikusan mozgó motornak. A robotok döntő többsége elektromos motorokat használ. A hordozható robotokban ismételten kefe nélküli és csiszolt egyenáramú motorokat, ipari robotokban pedig váltakozó áramú motorokat használnak. Ezeket a motorokat előnyben részesítik a könnyebb terhelésű rendszerekben, és ahol a mozgás túlnyomó része forgási.
rm feladat. A robot vezérlésének három különböző fázisa van, például észlelés, feldolgozás és cselekvés. Az érzékelők információt adnak az ízületek helyzetéről és a végeffektorról a robotnak, majd ezeket az információkat feldolgozzák a vezérlőegységnek, és kiszámítják a megfelelő jelet a mechanikusan mozgó motornak. A robotok döntő többsége elektromos motorokat használ. A hordozható robotokban ismételten kefe nélküli és csiszolt egyenáramú motorokat, ipari robotokban pedig váltakozó áramú motorokat használnak. Ezeket a motorokat előnyben részesítik a könnyebb terhelésű rendszerekben, és ahol a mozgás túlnyomó része forgási.
Suresh Megaji
M. technika a vezeték nélküli kommunikációs rendszerekben
Műszaki tartalomíró

Ha részt akar venni a „robotikában” és alkalmazásukban az „iparban”, akkor tudnia kell a robotikában használt „motorokról”, mivel a robotika leginkább a motoroktól függ. Alapvetően a „robotgépeket” használják a gyártás különböző alkalmazásaihoz. Különböző „motorokat”, például DC, Pulsed, Stepper, Optical Drive, Partial turn és Hall effekt motorokat stb. Használnak néhány technikával, hogy alkalmazzák őket az iparban és barátságossá tegyék őket, például:
- A DC motorokat akkumulátor-orientált alkalmazásokhoz, lassabb fordulatszámú, mobilitási alkalmazásokhoz használják.
- Ahol forgásorientált alkalmazásra van szükségünk, használhatunk Stepper motorokat, mint például egypólusú és bipoláris motorokat.
- Fej- és karmozgásokhoz részleges fordulású motorokat használhatunk.
- Ha mágneses tereket akarunk használni, használhatunk Hall Effect és optikai meghajtó motorokat stb.
Az intelligens motorokat használó robotika használatával pénzt, időt, helyet, veszélyes mozgásokat stb.
Ajay Sahare
Marketing vezető

Az ipari robotokat ipari gyártási környezetben használják. Ezeket a karokat kifejezetten olyan alkalmazásokhoz fejlesztették ki, mint a hegesztés, anyagmozgatás, festés és mások.
Nem minden ipari környezetben használt mechatronikai eszköz tekinthető robotnak. Az ISO (Nemzetközi Szabványügyi Szervezet) meghatározása szerint egy három vagy több tengelyen programozható, automatikusan vezérelt, újraprogramozható, többcélú manipulátor ipari robotnak tekinthető.
Az ipari robotikában használt motorok
- Váltakozó áramú (AC) motorok
- Egyenáramú (DC) motorok
- Servo Motors
- Léptető motorok.
1. A váltakozó áramú motorok tovább oszthatók aszinkron és szinkron típusokra. Például az indukciós váltóáramú motor egy aszinkron típusú egység, amely lényegében huzallal tekercselt állórészből és rotorból áll. Az áramellátás csatlakozik a vezetékhez, és a rajta átfolyó váltakozó áram elektromágneses (EM) mezőt indukál a tekercselt vezetékben, és elég erős mező biztosítja a rotor mozgásának erőt. A szinkron motorok állandó fordulatszámú motorok, amelyek szinkronban működnek a váltakozó áramú vezeték frekvenciájával, és amelyeket általában ott használnak, ahol pontos állandó fordulatszámra van szükség.
2. Számos ipari alkalmazás, beleértve a robotikát is, gyakran használja az egyenáramú motorokat a sebesség és az irányítás könnyű kezelhetősége miatt. Végtelen sebességtartományra képesek, a teljes sebességtől a nulláig, széles terhelési tartományban.
Mivel az egyenáramú motorok nagy nyomaték / tehetetlenség arányával rendelkeznek, gyorsan reagálhatnak a vezérlőjelek változásaira. Egy egyenáramú motor zökkenőmentesen vezérelhető nulla mozgásra, és azonnal ellenkező irányba gyorsulhat, anélkül, hogy komplex áramkapcsoló áramkörre lenne szükség. Az állandó mágneses kefe nélküli egyenáramú motorok általában drágábbak, mint a kefetípusok, bár előnyöket kínálhatnak az energiafogyasztásban és a megbízhatóságban.
Kommutátor nélkül a kefe nélküli motorok hatékonyabban és nagyobb sebességgel működhetnek, mint a hagyományos egyenáramú motorok. A legtöbb kefe nélküli egyenáramú motor trapéz alakú váltakozó áramú hullámformán működik, de egyes motorok szinuszos hullámokkal működnek. A szinuszhullámú kefe nélküli motorok alacsony fordulatszám mellett alacsony fordulatszámmal, alacsony nyomatékú hullámzással tudnak zökkenőmentesen működni, így ideálisak csiszoláshoz, bevonáshoz és más alkalmazásokhoz, például felületkezeléshez.
Csiszolt egyenáramú motorok esetén, ha azt szeretné, hogy a motor lassabban forogjon, anélkül, hogy energiát vesztene, használhatja az impulzusszélesség modulációt (PWM). Ez alapvetően a motor nagyon gyors be- és kikapcsolását jelenti. Így a motor alacsonyabb fordulatszámmal forog, mintha alacsonyabb feszültséget alkalmaznának anélkül, hogy gondoskodnának az energiáról.
Alapvetően a csiszolt egyenáramú motor által létrehozott nyomaték túl kicsi és a fordulatszám túl nagy ahhoz, hogy hasznos legyen. Tehát a sebességcsökkentést általában a sebesség csökkentésére és a nyomaték növelésére használják.
3. A szervomotorokat zárt hurkú rendszerekben használják digitális vezérlővel. A vezérlő sebességparancsokat küld egy meghajtó erősítőnek, amely viszont táplálja a szervomotort. A visszacsatoló eszközök valamilyen formája, például egy felbontó vagy kódoló, információt nyújt a szervomotor helyzetéről és sebességéről. A felbontó vagy kódoló integrálható a motorral, vagy távolról is elhelyezhető. A zárt hurkú rendszer miatt a szervomotor egy meghatározott mozgásprofillal működhet, amely be van programozva a vezérlőbe.
4. A léptetőmotorok visszacsatolással vagy anélkül is működhetnek, a motor forgása apró, szögletes lépésekre bontva. Pulzáló parancsjelek vezérlik, és pontosan meg tudnak állni egy parancsolt ponton, fék és tengelykapcsoló szerelvények nélkül. Az áramellátás megszüntetésekor az állandó mágneses léptetőmotor általában az utolsó helyzetében marad. Több léptetőmotor szinkronban tartható, ha közös forrásból hajtja őket.
Dev desai
Marketing vezető 
Ha részt kíván venni a robotikában, akkor meg kell ismerkednie a rendelkezésre álló sokféle motorral. Minden robotikai mozgás ilyen vagy olyan módon motoros, ezért fontos tudni, hogy mi a lehetősége.
DC motorok
Az egyenáramú motor mozgásirányát az akkumulátoros működtetés mellett a bemenő energia polaritása határozza meg. Ez feltétlenül szükséges a robotfunkciókhoz. Szerencsére ez a motortípus nagyon sokféle méretben, feszültségigénnyel rendelkezik, és mindenhol elérhető.
A különböző típusú motorok az alábbiak
- Mobilitás alapmotor
- Nagy sebességű hobbimotor
- Szíjhajtású motor
- Slot autó motor
- Pulzus működött
- Karhoz illesztett motor
- Bipoláris léptető mutatóval
Bio Motor
A bio-metal egy csodálatos anyag, amely néhány éve létezik, és számos alkalmazási területtel rendelkezik a robotika területén. Az ábrán láthatjuk, hogy egy bio-fémhuzal darabja a hosszának öt százalékával zsugorodik, ha csak néhány voltot alkalmaznak rajta. Évekig tartó tesztelés után a biohuzal erősnek, megbízhatónak és új termékek megjelenésével egyre hasznosabbnak bizonyult. Némileg lassabb válaszideje ideális robot- és kézi alkalmazásokhoz, ahol a rángatózás problémás lehet. A hosszú drótdarab jelentős mozgást eredményezhet, ha a robotkar teljes hosszában kinyújtva van. Jelenleg a kereskedelmi piacon vannak robotkaros készletek, amelyek a biofémet használják.
Relék
A robotika reléjét szinte mindig arra használják, hogy a motorok számára szánt energiát leválasszák a számítógép működéséhez szükséges tápegységről. Alacsony impedanciájuk miatt a motorok erős áramellátási követelményeket támasztanak a tápegységekkel szemben, és több hibát okoznak, amelyeket a számítógépek nem tudnak elviselni. Ezért jó ötlet külön nagyáramú forrást használni csak motorokhoz.
Mágnesszelepek
A mágnesszelepeket legjobban manipulátor vezérlőeszközként vagy operátor kapcsolóként lehet használni. Mozgásuk gyors és erős, ezért a fogókban szinte mindig rugót használnak a cselekvés lágyítására. Amint az ábrán látható, a fogó zárásához vezérlő vezetékeket használnak. Ezek a vezérlő vezetékek visszatérő rugóként is működhetnek. Az ilyen fogók inkább a gyártósori munkában találhatók meg, ahol a feladat nagyon kimért és szűk paramétereket takar.
Másodlagos funkciók
A legtöbb motoros funkció magában foglalja a mobilitást, a kar, a fej vagy valamilyen más látható külső mozgást, azonban néhány motoros mozgás nem annyira látható. A nagy ipari robotok olyan hidraulikus rendszereket használnak, amelyek szivattyúmotorokkal hozzák létre a hidraulikafolyadék üzemi nyomását. A motorok másik fontos másodlagos funkciója a vezérelt beállítás. A pontosság javítása érdekében a motorokkal összekapcsolt potenciométerek általában többfordulós készülékek.
Következtetés
A robotok nagyon összetett eszközök lehetnek, amelyek sokféle motoros mozgást igényelnek. Ez a cikk áttekintést nyújt azokról az eszközökről, amelyekkel robotépítőként foglalkozhat. Célszerű lenne a robotberendezések beszállítóival és a rendelkezésre álló kellékekkel kapcsolatos kutatással kezdeni. Hatalmas mennyiségű termék érhető el most, és az internet megkönnyíti a megkeresést, megismerését és használatát. Bármi legyen is az igénye, egy kis találékonyságnak és elszántságnak, amely minden robotépítőnek látszik, jól kell szolgálnia.
Samadan Wandre
Marketing vezető
„A robotikában használt motorok”
- Mobilitás alapmotor

- Nagy sebességű hobbimotor
- Szíjhajtású motor
- Slot autó motor
- Pulzus működött
- Karhoz illesztett motor
- Bipoláris léptető mutatóval

A nagyobb motorok a legalkalmasabbak olyan mobilitási alapokra, amelyek lehetővé teszik a robotok számára a terep manőverezését. Ezen motorok egy része sebességváltóval rendelkezik, hogy előállítsa a mobilitáshoz szükséges lassabb sebességet és nyomatékot. A feszültség motorra csökkentése szintén lassíthatja azt egy kívánatosabb sebességre. Csak kísérletekkel lehet megállapítani, hogy motorja alacsonyabb feszültséggel működik-e. Ha mégis megteszi, akkor sok bajt spórolt meg magának, ha nem, akkor más módon is lelassíthatja a motorokat. Néhány nagy sebességű motor használható, ha csigahajtóművet vagy csavaros fogaskereket használnak.
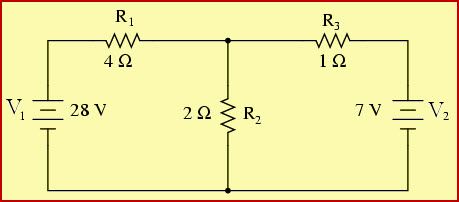
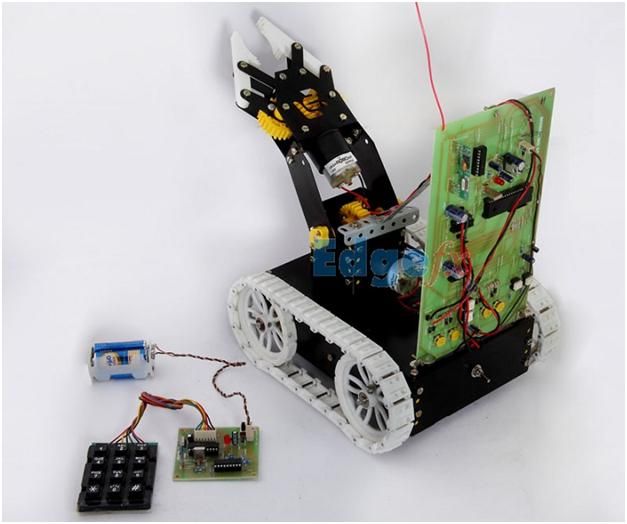
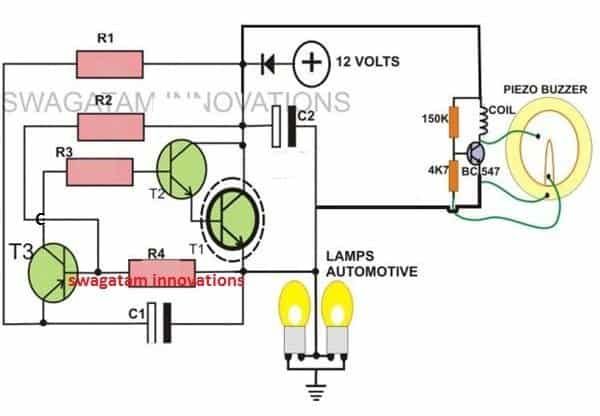
A csavaros fogaskerék példája látható a robotkar ábrán. Amikor a motor az óramutató járásával megegyező irányba fordul, a csavarszerelvény a motorhoz húzódik, és a kar összehúzódik, és amikor az óramutató járásával ellentétes irányba fordul, a kar kinyúlik. Bár a motor tengelye gyorsan forog, a kar mozgatása a csavarcsökkentés miatt lényegesen lassabb. Ebben a következő motoráramkör-ábrán egy egyenáramú motort látunk, amelyet teljesítménytranzisztor vezérel. Relé kapcsoló (Double Pole Double Throw) határozza meg az irányt. A Q1 tranzisztornak teljesítménytranzisztornak kell lennie, hogy elvegye a motor nagy terhelését.
Pulzáló motorok
Egyes motorok sebességcsökkentést eredményeznek, mivel impulzusos DC jelből működnek. Ez a jel általában körülbelül száz Hz. A motor sebessége az impulzus szélességének megváltoztatásával, nem pedig az impulzus frekvenciájának megváltoztatásával változtatható meg. Az ilyen motorok megtalálhatók a felesleges elektronikai üzletekben, és a hozzá kapcsolt impulzusgenerátor segítségével könnyen azonosíthatók. Bármely egyenáramú motort impulzusforrás vezérelhet, és egy ilyen áramkör sematikus ábrája szerepel.
Mint látható, egy 555-ös időzítőt választottak a hajtás oszcillátorának, amely körülbelül 100 Hz frekvenciát produkál. Az R1 ellenállás és a C kondenzátor stabilizálja és izolálja az impulzusgenerátort a motor által okozott tüskéktől. Mivel ez az eszköz 6–12 voltos tápegységből tud meríteni, érdemes a C4 és C6 kondenzátor értékét megváltoztatni a jobb eredmények érdekében, attól függően, hogy milyen feszültséget használ. Az impulzus kimenetet az IC1 harmadik érintkezőjéből vesszük, és az IC2 második tűjébe tápláljuk, szintén egy 555 időzítővel.
A második időzítő változtatja az impulzus szélességét azáltal, hogy beállítja a C6 kondenzátorba táplált feszültséget az R5 potenciométeren és az R6 ellenálláson keresztül. Az impulzus időtartama határozza meg a motor fordulatszámát, és az impulzus szélessége 10% -ról 100% -ra állítható.
A Q1 tranzisztor az impulzusszélesség által modulált jelet az R7 ellenálláson keresztül fogadja. Mivel a Q1 gyengeáramú eszköz, továbbítja a jelet a Q2-nek, egy teljesítménytranzisztornak, amely képes kezelni a motor áramigényét. Ezek a tranzisztorok nem kritikusak, és szinte bármilyen típusú alacsony áramú tranzisztor működni fog. A relé határozza meg, hogy a motor milyen irányba halad.
Léptető motorok
Az összes motor közül a legösszetettebb a léptetőmotor. A név következtetéséhez hasonlóan a motor is fokozatosan növekszik, és impulzus-működtetésű. A lépésenkénti pontos fordulási fok gyártónként vagy modellenként változhat, de a 20 fok népszerű, és 18 lépést produkál egy teljes körre. A léptetőmotoroknak két alapvető típusa van: bipoláris és unipoláris. Amint az a léptetőmotor vázlatán látható, a bipoláris egyszerűen két tekercses motor.
Az unipoláris típus két tekercs középső csapokkal. Ha a középső csapokat figyelmen kívül hagyják, az unipoláris motor bipoláris típusként működhet. A léptetőmotor két tekercsét a felvett impulzusok felváltva, egymástól függően polaritással táplálják tekercsről tekercsre. Ennek a folyamatnak a térképe található a munkadiagramon, amely grafikusan ábrázolja a motoros műveletet. A hagyományos egyenáramú motorokkal ellentétben a forgatónyomaték a sebességgel csökken. A léptetőmotor előmozdításához egy speciális típusú hajtóműre is szükség van, amelyet a motorhoz kell szállítani. Vezérlőegység építése csak akkor ajánlott, ha a motorhoz jó specifikációs lap tartozik, amely tartalmaz alkatrész-ajánlásokat és teljes vázlatot.
Előfordulhat, hogy a motornak pufferekre van szüksége a meghajtórendszer leválasztásához, vagy külön tápegységre lehet szüksége. Bármilyen igény is legyen, motoronként jelentősen eltérhetnek. A hobbiboltok a legmegbízhatóbb léptetőmotorok szállítói, és bár a felesleges elektronikai üzletekben esetenként előfordulhat, hogy nem tartalmazzák a szükséges specifikációkat
Részleges motorok
Egyes robotfunkciók csak részleges fordulatot igényelnek, például a fej vagy a kar mozgását. Ezeknek a legegyszerűbb módja a helyzetütközők és a csúszó fogaskerekek. Az ilyen típusú motor mechanikai részleteinek szemléltetését fentebb mutatjuk be. A mikrokapcsolókat stop érzékelőként lehet kikapcsolni és kikapcsolni a következő művelet irányát.
Az alsó kerék a motorhoz van csatlakoztatva, míg a felső kereket egy kör alakú filcdarab választja el az alsó keréktől. Amikor az alsó kerék elfordítja a felső kereket, addig forog vele, amíg az ütköző érintkezik a mikrokapcsolóval. Néhány kivitel nem rendelkezik a motor leállításáról, ezért a távtartókkal ellátott egyszerű csavarok motor leállóként működnek.
Bio-Motor
A bio-metal egy csodálatos anyag, amely néhány éve létezik, és számos alkalmazási területtel rendelkezik a robotika területén. Az ábrán láthatjuk, hogy egy bio-fémhuzal darabja a hosszának öt százalékával zsugorodik, ha csak néhány voltot alkalmaznak rajta. Évekig tartó tesztelés után a biohuzal erősnek, megbízhatónak és új termékek megjelenésével egyre hasznosabbnak bizonyult. Némileg lassabb válaszideje ideális robot- és kézi alkalmazásokhoz, ahol a rángatózás problémás lehet. A hosszú drótdarab jelentős mozgást eredményezhet, ha a robotkar teljes hosszában kinyújtva van. Jelenleg a kereskedelmi piacon vannak robotkaros készletek, amelyek a biofémet használják.
Bhaskar Singh
Marketing vezető
 Az ipari robotok olyan eszközök, amelyek bizonyos mértékben megismétlik az emberi mozgást a veszély csökkentésével együtt, több erőt, pontosságot és folytonosságot nyújtva. Széles körű motoros mozgásra van szükségük, működési módjuktól, vezérlésüktől, a használt szerszámoktól és az elvégzendő munkától függően. Az ipari robotmotornak képesnek kell lennie arra, hogy a szokásos motoroknál a feladatok széles skáláját tudja kezelni, hogy egy adott feladatra szakosodhasson.
Az ipari robotok olyan eszközök, amelyek bizonyos mértékben megismétlik az emberi mozgást a veszély csökkentésével együtt, több erőt, pontosságot és folytonosságot nyújtva. Széles körű motoros mozgásra van szükségük, működési módjuktól, vezérlésüktől, a használt szerszámoktól és az elvégzendő munkától függően. Az ipari robotmotornak képesnek kell lennie arra, hogy a szokásos motoroknál a feladatok széles skáláját tudja kezelni, hogy egy adott feladatra szakosodhasson.
Az elektromos motorokat leggyakrabban az ipari robotikában használják a rendkívül hatékony energiaellátás és a viszonylag egyszerű tervezés miatt, ami minden szempontból - telepítés, karbantartás és szervizelés szempontjából - népszerűbb lehetőség a költség-teljesítmény arány szempontjából.
A szükséges munkától függően különböző motorokat használnak különböző célokra. Például egyenáramú motorokat használnak az óramutató járásával megegyező és az óramutató járásával ellentétes irányú mozgásokhoz, példák darukban és emelőkben, impulzusos motorokat használnak impulzusos mozgások biztosítására egyenáramú impulzus szélességet használva, részleges fordulási motorokat használnak a fej és a karszerű mozgások biztosításához, és a legösszetettebb - léptetőmotorokkal fokozatosan növekszik a lépcsőfok.
Ezenkívül a munka típusától függően különböző minősítésű és méretű motorokat használnak különböző célokra. Többféle motor létezik, amelyek mindegyike különböző helyeken különböző alkalmazásokkal rendelkezik, a munkától és a robot kialakításától függően.
Mohan Krishna. L
Értékesítési és támogatási vezető
A robotokat használják arra a feladatra, amelyet emberek végezhetnek, és számos oka van annak, hogy a robotok jobbak, mint az emberek. 
A robotoknak két fő típusa van:
Mobil robot: Ez mozog a lábakon vagy a pályán.
Helyhez kötött robot: Ennek fix alapja van.
Az álló robotok általában a robotfegyverek használhatók tárgyak felvételére vagy más olyan feladat elvégzésére, amely magában foglalja az objektum elérését.
A robotkarnak három alapvető része van: -
- Vállízület
- Csuklóízület
- Rögzített alap
Szüksége van egy robotra a
- Gyors munkavégzés és veszélyes környezet.
- Képesség újra és újra megismételni a feladatokat.
- Pontos munkavégzés képessége.
- Képesség különböző feladatok elvégzésére.
- Hatékonyság.
A motor olyan eszköz, amely átalakítja az elektromos energiát mechanikai energiává, azaz elektromechanikus eszközzé. Kétféle motor létezik, mint például az AC motor és az egyenáramú motor
Az ipari robotikában használt motor a szervomotor. A szervomotor egy egyszerű villanymotor, amelyet szervomechanizmus segítségével vezérelnek. Ha a vezérelt motort váltóáram működteti, akkor ezt AC szervomotornak hívják, különben DC szervomotornak. A legtöbb szervomotor körülbelül 90–180 fokkal el tud forogni. teljes 360 fokos vagy annál több. A szervomotor robotikai alkalmazásai közül néhány
- Szervomotoros alkalmazás robotokban, azaz Egyszerű robotfelvevő robot, amelyet arra használnak, hogy egy tárgyat egy helyzetből vegyen fel, és másba helyezze az objektumot.
- A szállítószalagokban található szervomotort használják
- az iparban Egységek gyártása és összeszerelése, hogy egy tárgyat egyik gyûjtõállomásról a másikra továbbítsanak. Például: - Palacktöltési folyamat.
- Szervomotor robotikus járműben itt a Kerekekben használt szervomotor. Mivel a folyamatos forgatású szervomotort használják.
Dinesh.P
Marketing vezető
 Robotokat kell bevezetni, hogy csökkentsék az emberi fáradságokat és segítsenek szerencsét teremteni az emberek számára a jövőbeli fejlesztésekhez. A robotok kifejezés azt a gépet jelenti, amely utánozza a különféle emberi tulajdonságokat. A robotika magában foglalja a gépészeti, elektronikai, elektromos és informatikai mérnöki ismereteket. A robotokban használt motorok: DC motorok, Stepper motorok és Servo motorok
Robotokat kell bevezetni, hogy csökkentsék az emberi fáradságokat és segítsenek szerencsét teremteni az emberek számára a jövőbeli fejlesztésekhez. A robotok kifejezés azt a gépet jelenti, amely utánozza a különféle emberi tulajdonságokat. A robotika magában foglalja a gépészeti, elektronikai, elektromos és informatikai mérnöki ismereteket. A robotokban használt motorok: DC motorok, Stepper motorok és Servo motorok
Hol,
- Az egyenáramú motorokat a folyamatos forgatáshoz használják
- A léptetőmotorokat néhány fokos forgatáshoz használják
- A szervomotorokat helymeghatározásra használják, autókban és repülőgépekben is használható
Ganesh .J
Marketing vezető 
A robotokat az emberek által elvégezhető munka elvégzésére használják, és csökkentik az emberi erőfeszítéseket és időt, valamint javítják a minőséget. Az ipari robotikában használt motorok
- Váltakozó áramú (AC) motorok
- Egyenáramú (DC) motorok
- Servo Motors
- Léptető motorok.