
A számítás során a CAN interfész lehet egy megosztott határ a rendszerbeszélgetési információk két külön részén. A beszélgetést számítógépes hardver, szoftver, emberek, perifériák és ezek kombinációi között lehet folytatni. A számítógép egyes hardvereszközeihez hasonló az érintőképernyő, mert egy érintőképernyő képes információkat megosztani és fogadni az interfészen keresztül, míg más eszközök, például a mikrofon, az egér csak egy út. Az interfészek főleg kétféle mint például a hardver interfész és a szoftver interfész. A hardver interfészeket sok eszközben használják, például a bemeneti, kimeneti eszközökben, buszokban és tárolóeszközökben. Ez a CAN interfész a logikai jelekkel határozható meg. A szoftveres felület széles skálán, különböző szinteken érhető el. Az operációs rendszer kapcsolódhat a hardver különböző részeihez. A programok vagy alkalmazások a Lehet, hogy az operációs rendszernek kommunikálnia kell folyamokon keresztül és objektumorientált programozásban az objektumoknak bármilyen alkalmazásban módszerekkel kell kommunikálniuk.

CAN BUS
A CAN buszt 1983-ban fejlesztették ki a Robert Bosch GmbH-nál. Ezt a protokollt 1986-ban adták ki a SAE Kongresszuson (Society of Automobile Engineers) Detroitban, Michiganben. Az első CAN protokoll a Philips és az Intel gyártotta, és 1987-ben jelent meg a piacon. De a BMW-8-as sorozat volt az első olyan jármű, amely CAN protokollon alapuló multiplex kábelezési rendszert tartalmaz.

CAN BUS
A teljes formája A CAN egy vezérlő területi hálózat . Ez egyfajta járműbusz, amelyet főleg különféle járművek megengedésére terveztek eszközök és mikrovezérlők gazda számítógép nélkül kölcsönhatásba lépni egymással. Ez a protokoll üzeneten alapul, és főként a gépkocsik elektromos vezetékezésére szolgál. A Bosch kiadta a CAN különböző verzióit, 1991-ben pedig a legújabb CAN 2.0-t.
A CAN két részből áll, főleg az A részből és a B részből, ahol az A rész 11 bites azonosító, és szabványos formátumban van. A B rész egy 29 bites azonosító, és kiterjesztett formátumban van. A 11 bites azonosítókat használó CAN-t AN 2.0A-nak, a 29 bites azonosítókat használó CAN-t 2.0B-nek hívják.
A CAN és az USB összekapcsolása
A CAN és az USB összekapcsolása egy egyszerű eszköz, amelyet a CAN busz figyelésére használnak. Ez az eszköz a NUC140LC1CN 32 K Cortexes-M0 mikroprocesszort használja. CAN és USB perifériákkal is rendelkezik.
A CAN és az USB interfészének főbb jellemzői:
- Nagyon egyszerű megtervezni
- Jól illeszkedik a a protokoll LAWICEL CANUSB
- Olyan eszközként mutatja be magát, mint az FTDI USB
- Támogatja a CAN 2.0B 29 bites és a CAN 2.0A 11 bites képkockákat
- Belső üzenetpufferből (FIFO CAN) áll
- Az USB portról táplál
- A firmware frissítésekhez tömegtároló eszközt (Flash-resident USB) használnak
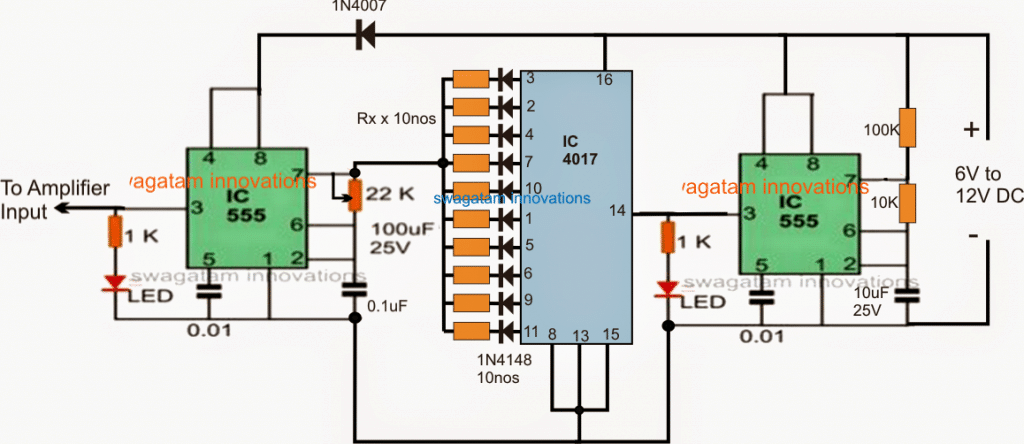
Sematikus ábrája
A CAN és az USB interfészének áramköri konfigurációja az alábbiakban látható. CAN transzformátort használnak annak érdekében, hogy az NUC140 CAN eszköz kölcsönhatásba léphessen a CAN busszal. A TJA1051T chip megoldja a célt az NXP-től. Az NUC140 mikroprocesszor képes 5 V-os tápegységgel dolgozni, nincs szükség további 3,3 V-os feszültségszabályozóra. Ez a kényelmes elrendezés egyszerű feladatot jelent a CAN-USB interfész megvalósításában.

Sematikus ábrája
Az áramkör három állapotjelző LED-del van felépítve: D1, D2 és D3.
- Itt a D1 dióda állapota azt mondja, hogy az USB csatlakozik a gazdagéphez
- Itt a D2 dióda állapota mondja a CAN busz aktivitását
- A CAN busz hibáit D3 diódával jelezhetjük
Az NUC140 mikroprocesszor nem rendelkezik integrált rendszerbetöltővel, és a programozás legjobb módja csak a Nuvoton ICP programozó és KAR SWD (Serial Wire Debug) interfész. Ha a rendszerindító betöltője korábban egy programmal került ki, akkor az elindítható. A JP1 csatlakoztatása az interfész áramellátása előtt elindítja a rendszerindítót.
Boot Loader
Az NUC140LC1 mikroprocesszor flash memóriáját két részre osztják. Futtatják a felhasználói programkódot és a boot betöltőt. A rendszerbetöltő és a végrehajtó felhasználói program mérete 4K és 32K. Itt a Nuvoton tömeges tárolóeszköz (MSD) rendszerbetöltőjét egy teljesen működőképes USB rendszerindító felépítéséhez használják. A rendszerindító aktiválódik egy JP1 jumper csatlakoztatásával. Tehát végül egy cserélhető meghajtónak láthatónak kell lennie a gazdagép fájlrendszerében, 32 KB méretű. Csak másolja és illessze be a CAN frissítését USB firmware-re a rendszerbetöltő meghajtóra. Húzza ki az USB-kábelt, húzza ki az áthidalót, majd dugja be újra. Az új firmware frissítésének most futnia kell.

Boot Loader
CAN - USB interfész programozás és NuTiny-SDK-140
A mikroprocesszor programozása A NUC140-nek Nuvoton ICP programozó alkalmazásra és a Nuvoton Nu-Link programozójára van szüksége. De itt a NuTiny-SDK-140 (NUC140 demo board) elérhető a Digi-Key-től. Két részből áll, például a Nu-Link programozókból és az NUC140 chipet tartalmazó részből. Ez a tábla még a Nu-Link részének elválasztására is perforált. Valójában ezt az eszközt kizárólag a NUC140 bemutató tábla köré tervezheti, az egyetlen extra CAN adó-vevő chip elengedhetetlen.

NUC140 Board
Tehát itt arról van szó, hogy a CAN interfész USB-vel, CAN busz, CAN és USB összekapcsolása, sematikus ábra, boot betöltő és NUC140 mikroprocesszor. Reméljük, hogy jobban megértette ezt a koncepciót. Továbbá, ha bármilyen kérdése van ezzel a cikkel kapcsolatban, kérjük, adja meg értékes javaslatait az alábbi megjegyzés szakaszban kommentálva. Itt van egy kérdés az Ön számára, mik a CAN interfész alkalmazásai?
Fotók:
- CAN - USB interfész saelig
- CAN BUS canbuskit
- NUC140 utasíthatók









{kind=link}
{kind=link}
{kind=link}