
Meghatározás
A kefe nélküli egyenáramú motor állandó mágneses rotorból és állórészből áll, többfázisú armatúra tekercs formájában. Abban különbözik a hagyományos egyenáramú motortól, hogy nem tartalmaz kefét, és a kommutációt elektromos úton hajtják végre, elektronikus meghajtó segítségével táplálják az állórész tekercseit.
Alapvetően egy BLDC motort kétféleképpen lehet megépíteni - úgy, hogy a rotort a magon kívül helyezzük el, a tekercseket pedig a magban, a másikat pedig úgy, hogy a tekercseket a magon kívülre helyezzük. Az előbbi elrendezésben a rotormágnesek szigetelőként működnek, és csökkentik a motorból történő hőelvezetés sebességét, és alacsony áram mellett működnek. Jellemzően ventilátorokban használják. Ez utóbbi elrendezésben a motor több hőt vezet el, és ezáltal megnő a nyomatéka. Merevlemez-meghajtókban használják.

BLDC
4 Pólus 2 fázisú motor működése
A kefe nélküli egyenáramú motort egy elektronikus hajtás hajtja, amely a rotor forgásakor az állórész tekercsei között kapcsolja a tápfeszültséget. A rotor helyzetét az (optikai vagy mágneses) jelátalakító figyeli, amely információt szolgáltat az elektronikus vezérlőnek, és ennek alapján meghatározza az áramellátásra kerülő állórész tekercselését. Ez az elektronikus meghajtó tranzisztorokból áll (mindegyik fázishoz 2), amelyeket mikroprocesszoron keresztül működtetnek.

BLDC-DC
Az állandó mágnesek által létrehozott mágneses mező kölcsönhatásba lép az állórész tekercsében lévő áram által indukált térrel, mechanikus nyomatékot létrehozva. Az elektronikus kapcsoló áramkör vagy a hajtás az állórész tápfeszültségét kapcsolja úgy, hogy a kölcsönhatásba lépő mezők között állandó 0–90 fokos szöget tartson. A Hall-érzékelők többnyire az állórészre vagy a rotorra vannak felszerelve. Amikor a rotor áthalad a hall érzékelőn, az északi vagy déli pólus alapján, magas vagy alacsony jelet generál. Ezen jelek kombinációja alapján meghatározzuk az áramellátást biztosító tekercset. A motor üzemben tartása érdekében a tekercsek által létrehozott mágneses térnek el kell mozdulnia, miközben a rotor mozog, hogy utolérje az állórész terét.

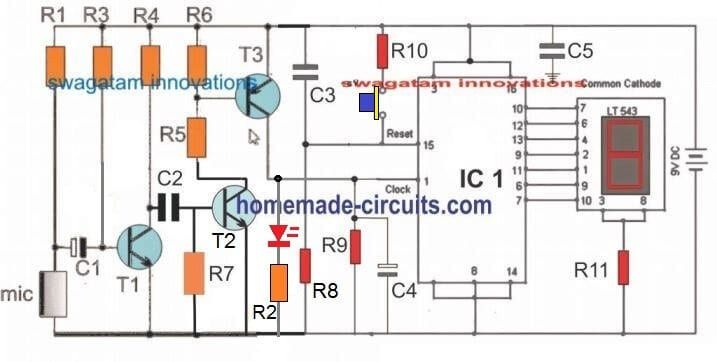
Áramkör
A 4 pólusú, 2 fázisú kefe nélküli egyenáramú motorban egyetlen hall érzékelőt használnak, amely az állórészre van ágyazva. A rotor forgásakor a hall-érzékelő érzékeli a helyzetet, és magas vagy alacsony jelet fejleszt ki, a mágnes pólusától függően (északi vagy déli). A hall-érzékelő egy ellenálláson keresztül csatlakozik a tranzisztorokhoz. Amikor az érzékelő kimenetén nagyfeszültségű jel jelentkezik, az A tekercshez kapcsolt tranzisztor vezetni kezd, biztosítva az áramlás útját és ezáltal az A tekercset. A kondenzátor a teljes tápfeszültségig kezd töltődni. Amikor a hall-érzékelő észleli a rotor polaritásának változását, kis feszültségű jelet fejleszt ki a kimenetén, és mivel az 1 tranzisztor nem kap tápfeszültséget, leállási állapotban van. A kondenzátor körül kialakult feszültség Vcc, amely a 2 tápfeszültségendtranzisztor, és a B tekercs most áram alatt van, ahogy az áram áthalad rajta.
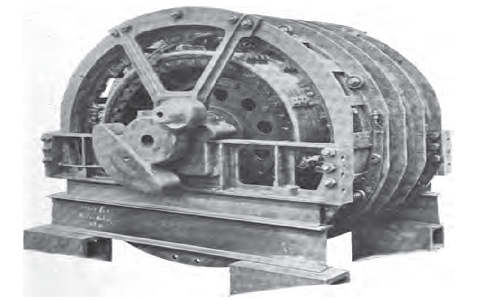
A BLDC motorok rögzített állandó mágnesekkel rendelkeznek, amelyek forognak, és rögzített armatúrájuk van, kiküszöbölve az áramnak a mozgó armatúrához való csatlakoztatásával kapcsolatos problémákat. És valószínűleg több pólus van a rotoron, mint az állórész vagy a reluktancia motor. Ez utóbbiak lehetnek állandó mágnesek nélkül, csak a pólusok, amelyeket a rotor indukál, majd az időzített állórész tekercselésével elrendezésbe vonják. Elektronikus vezérlő helyettesíti a szálcsiszolt egyenáramú motor kefe / kommutátor szerelvényét, amely folyamatosan kapcsolja a fázist a tekercsekre, hogy a motor megforduljon. A vezérlő összehasonlító időzített teljesítményelosztást hajt végre egy szilárdtest áramkör használatával a kefe / kommutátor rendszer helyett.

BLDC motor
7 A kefe nélküli egyenáramú motorok előnyei
- Jobb sebesség és nyomatékjellemzők
- Nagy dinamikus válasz
- Magas hatásfok
- Hosszú élettartam az elektromos és súrlódási veszteségek hiánya miatt
- Zajmentes működés
- Nagyobb sebességtartományok
Alkalmazások:
A kefe nélküli egyenáramú motor bemutatása óta csökkent, az anyagok és a kialakítás progressziója miatt. Ez a költségcsökkenés, a Brush DC Motor felett található számos fókuszponttal párosítva, a Brushless DC Motor népszerű alkatrészévé válik számos megkülönböztető alkalmazásban. A BLDC motort használó alkalmazások a következőkre korlátozódnak:
- A fogyasztói elektronika
- Szállítás
- Fűtés és szellőzés
- Ipari mérnökség
- Modelltervezés
A munka elve
A BLDC motorok működésének alapelvei megegyeznek a szálcsiszolt egyenáramú motorral, vagyis a belső tengely helyzetének visszacsatolása. Csiszolt egyenáramú motor esetén a visszacsatolás mechanikus kommutátor és kefék segítségével valósul meg. A BLDC motoron belül több visszacsatoló érzékelővel érhető el. A BLDC motorokban többnyire Hall-effektus-érzékelőt használunk, amikor a rotor mágneses pólusai áthaladnak a hall-érzékelő közelében, HIGH vagy LOW-szintű jelet generálnak, amellyel meghatározható a tengely helyzete. Ha a mágneses tér iránya megfordul, akkor a kialakult feszültség is megfordul.
BLDC motor vezérlése
A vezérlőegységet a mikroelektronika hajtja végre, számos csúcstechnológiai választással. Ez megvalósítható mikrovezérlő, dedikált mikrovezérlő, vezetékes mikroelektronikai egység, PLC vagy hasonló más egység segítségével.
Az analóg vezérlő továbbra is használ, de nem tudja feldolgozni a visszacsatolási üzeneteket és ennek megfelelően vezérelni. Az ilyen típusú vezérlő áramkörökkel nagy teljesítményű vezérlő algoritmusok valósíthatók meg, például vektoros vezérlés, tereporientált vezérlés, nagysebességű vezérlés, amelyek mind a motor elektromágneses állapotához kapcsolódnak. Ezenkívül a külső hurok vezérlése különféle dinamikai követelményekhez, például csúszó motorvezérléshez, adaptív vezérléshez, prediktív vezérléshez stb.
Mindezek mellett találunk nagy teljesítményű PIC (Power Integrated Circuit), ASIC (Application Specific Integrated Circuits) stb. ez nagyban leegyszerűsítheti a vezérlés és az elektromos elektronikus egység felépítését. Például ma egy komplett PWM (impulzusszélesség-moduláció) szabályozóval rendelkezünk egyetlen IC-ben, amely egyes rendszerekben a teljes vezérlőegységet helyettesítheti. Az összetett meghajtó IC teljes megoldást kínál mind a hat főkapcsoló háromfázisú átalakítóban történő vezetésére. Számos hasonló integrált áramkör létezik, amelyek napról napra egyre többet adnak hozzá. A nap végén a rendszer összeállítása valószínűleg csak egy vezérlő szoftvert tartalmaz, az összes hardver megfelelő formájú és formájú lesz.
A PWM (Pulse Width Modulation) hullám a motor fordulatszámának szabályozására használható. Itt az átlagos feszültség adott, vagy a motoron átáramló átlagos áram a motor sebességét szabályozó impulzusok BE és KI idejétől függően változik, vagyis a hullám munkaciklusa szabályozza annak sebességét. Az üzemi ciklus (ON idő) megváltoztatásával megváltoztathatjuk a sebességet. A kimeneti portok felcserélésével hatékonyan megváltoztatja a motor irányát.
Sebesség ellenőrzés
A BLDC motor fordulatszám-szabályozása elengedhetetlen ahhoz, hogy a motor a kívánt sebességgel működjön. A kefe nélküli egyenáramú motor fordulatszámát a bemeneti egyenfeszültség szabályozásával lehet szabályozni. Minél nagyobb a feszültség, annál nagyobb a sebesség. Amikor a motor normál üzemmódban működik, vagy a névleges fordulatszám alatt működik, az armatúra bemeneti feszültségét a PWM modell megváltoztatja. Ha egy motort a névleges fordulatszám felett működtetnek, a fluxust a kilépő áram elősegítésével gyengítik.
A sebességszabályozás lehet zárt vagy nyitott hurkú.
Nyitott hurok sebességszabályozása - Ez magában foglalja a motor termináljaira alkalmazott egyenfeszültség egyszerű vezérlését az egyenfeszültség levágásával. Ez azonban valamilyen áramkorlátozást eredményez.
Zárt hurok sebességszabályozás - Ez magában foglalja a bemeneti tápfeszültség szabályozását a motor visszacsatolásán keresztül. Így a tápfeszültséget a hibajel függvényében szabályozzuk.
A zárt hurkú sebességszabályozás három alapelemből áll.
- PWM áramkör a szükséges PWM impulzusok előállításához. Ez lehet egy mikrokontroller vagy egy időzítő IC.
- Érzékelő eszköz a motor tényleges fordulatszámának érzékelésére. Ez lehet hall-effektus-érzékelő, infravörös érzékelő vagy optikai kódoló.
- Motoros hajtás a motor működésének vezérléséhez.
Ez a technika a tápfeszültség megváltoztatására a hibajel alapján történhet a pid vezérlési technikával vagy fuzzy logikával.
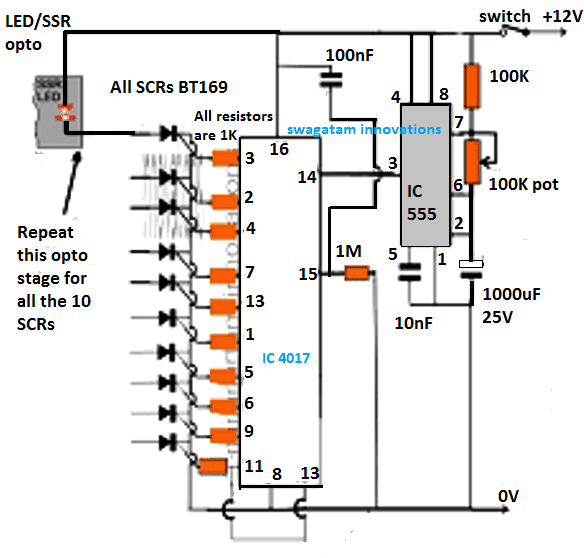
Alkalmazás a kefe nélküli egyenáramú motor fordulatszám-szabályozásához

BLDC DC motor vezérlés
A motor működését optocsatolóval és MOSFET elrendezéssel vezérlik, ahol a bemeneti egyenáramot a mikrovezérlő PWM technikáján keresztül vezérlik. Amint a motor forog, a tengelyén található infravörös led fehér fénnyel világít meg, mivel a tengelyén fehér folt van, és visszatükrözi az infravörös fényt. A fotodióda megkapja ezt az infravörös fényt, és megváltozik az ellenállása, ezáltal változik a csatlakoztatott tranzisztor tápfeszültsége, és impulzust kap a mikrovezérlő, hogy létrehozza a percenkénti fordulatok számát. Ez a sebesség megjelenik az LCD-n.
A szükséges sebességet a mikrokontrollerhez illesztett kezelőben kell megadni. Az érzékelt sebesség és a kívánt sebesség közötti különbség a hibajel, és a mikrovezérlő a fuzzy logika alapján generálja a hibajelnek megfelelő PWM jelet, hogy a motor egyenáramú bemenetét adja.
Így zárt hurkú vezérléssel szabályozható a kefe nélküli egyenáramú motor fordulatszáma, és bármely kívánt sebességgel forgatható.
Photo Credit:









{kind=link}