A bejegyzés egy olyan módszert ismertet, amely valószínűleg felhasználható a passzív infravörös érzékelő képességének javítására, még az emberi statikus vagy írószeres jelenlét észlelésére is. Ez a funkció általában nem lehetséges a hagyományos PIR érzékelőkkel.
Hogyan érzékeli a PIR az emberi jelenlétet
Számos PIR alapú mozgásérzékelő alkalmazást már megvitattam ezen a weboldalon, azonban ezek az alkalmazások megkövetelik, hogy az emberi jelenlét folyamatosan mozgásban legyen, hogy a PIR észlelje jelenlétüket. Ez nagy hátránynak tűnik, amely megakadályozza, hogy ezek az egységek érzékeljék állandó vagy álló emberi foglaltság.
A fentiekben kifejtett hátránynak azonban oka van. A hagyományos PIR-érzékelők úgy működnek, hogy érzékelik az emberi test IR-jeleit az első lencsén lévő párhuzamos résen keresztül, és belső áramköre csak akkor aktiválódik, amikor az IR-jelek keresztezik ezeket az érzékelőhelyeket („látomások”).
Az infravörös jelek keresztezése az érzékelő réseken keresztül lehetővé teszi a PIR áramkör számára, hogy az információt két megfelelő váltakozó impulzussá alakítsa, amelyet viszont kijavítanak, hogy létrehozzák a kiváltó feszültséget a PIR kimeneti tüskéjénél.
A PIR nem ismeri fel az írószer célt
Ez azt jelenti, hogy ha az IR forrás mozdulatlan, akkor nem kéri a PIR modult, hogy kiváltó jelet hozzon létre a kimeneti tűn. Ez azt is magában foglalja, hogy a forrásból érkező infravörös jelnek valahogy folyton kereszteznie kell az adott PIR érzékelő réseket, hogy lehetővé tegye az adott ember érzékelését a zónán belül.
Úgy tűnik, erre nincs közvetlen vagy egyszerű megoldás, mert a PIR modulok nem módosíthatók belsőleg erre, ami megbénítja az egységet az álló emberi jelenlét észlelésétől.
Egy logikus megfigyelés azonban azt mondja nekünk, hogy ha változó infravörös forrása lehet szükséges a PIR modul aktiválásához, akkor miért ne kényszerítené magát a PIR-t is állandó mozgásba a téma helyett.
A koncepció a következő GIF szimuláció segítségével vizualizálható, amely egy oszcilláló PIR modult és egy statikus embert mutat a detektáló zónában.

Itt láthatjuk, hogy egy oszcilláló PIR hogyan alkalmazkodik a kérdéshez, és hogyan alakítja át önmagát, lehetővé téve még statikus IR-alanyok detektálását is.
Ez azért válik lehetővé, mert mozgásával a PIR modul az álló IR-forrást a két vételi résszel folyamatosan változó IR-képalkotássá alakítja.
Bár az ötlet komplexnek tűnik, valójában egyszerűen megoldható egy lassan oszcilláló PwM vezérelt motor áramkörrel.
A következő szakaszokban megtudhatjuk a teljes mechanizmust és az áramkör részleteit.
Mint már tárgyaltuk, a hagyományos PIR modulok csak mozgó élő tárgyakat képesek felismerni, és nem tudnak azonosítani egy álló célpontot, amely csak emberi mozgásérzékelőként korlátozza alkalmazását.
Azokban az alkalmazásokban, ahol a motívumok felismerése szükségessé válik az ilyen helyzetekben, a hagyományos PIR használhatatlanná válhat, és némi külső megoldást igényelhet maga a frissítés.
PIR tervezése mozgás nélküli célok detektálására
A fenti szakaszban megtudtuk, hogy ahelyett, hogy a célpontnak mozgásban kellene lennie, a PIR modul maga is áthelyezhető egy adott sugarú körön a kívánt statikus célérzékelés megvalósításához.
A következő szakaszokban megismerhetünk egy egyszerű áramköri mechanizmust, amelyet egy kis DC motorra szerelt PIR-vel lehet használni a javasolt rezgésekhez.
A PWM / Flip Flop vezérlésű motorvezérlő
A rendszer alapvetően megköveteli egy PWM által vezérelt sebesség meghatározása és egy flip flop váltás a motor számára. Az alábbi ábra bemutatja, hogy ezek a jellemzők hogyan tulajdoníthatók a PIR motornak egy egyszerű áramkör segítségével:

A bemutatott áramkör egyetlen IC HEF40106 hexafejtő invertáló schmitt kapu IC-t használ, amely 6 inverter NEM kaput tartalmaz.
Az N1 és N2 kapuk úgy vannak konfigurálva, hogy állítható PWM kimenetet állítsanak elő, amelyet a puffereket alkotó N4, N5, N6 kapukhoz vezetnek.
Ezeknek a puffer kapuknak a közös kimenete a motorvezérlő mosfet kapujáig ér véget.
A PWM tartalmat a P1 segítségével állítjuk be, amelyet végül a csatlakoztatott motorra alkalmazunk egy sor DPDT relé érintkező segítségével.
Ezek a relés érintkezők határozzák meg a motor mozgásának irányát (az óramutató járásával megegyező vagy az óramutató járásával ellentétes irányban).
Ezt a flip flop DPDT reléérintkezőket az N3 kapu köré konfigurált Astable időzítő vezérli, ahol a C3 / R3 kondenzátor meghatározza, hogy a relének milyen sebességgel kell átállnia annak érdekében, hogy a motor folyamatosan változtassa forgási irányát.
A fenti kialakítás lehetővé teszi a motor számára, hogy egy adott radiális zónán keresztül hajtsa végre a szükséges lassú oda-vissza oszcilláló mozgást.
Kiválasztható a C3, amely 5-6 másodpercenként megkezdi az átállást, és a PWm beállítható a rendkívül lassú motoros mozgás lehetővé tételéhez, mert csak azt kell biztosítania, hogy a PIR rései keresztezzék a cél IR jeleit a időben.
Mivel azonban a motor működése lassú, a PIR kimenetét késleltetett OFF időzítőn keresztül kell fenntartani, hogy a csatlakoztatott terhelés ne kapcsoljon ki és be, miközben a motor mozgása felváltva átvágja az IR vonalakat az emberi tartózkodástól.
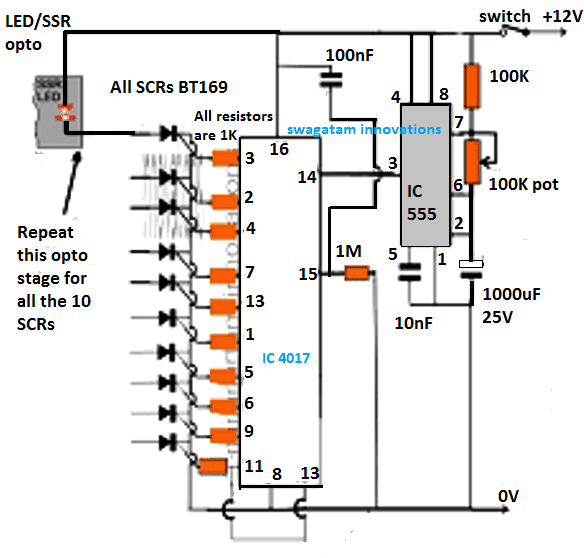
A késleltetés időzítője
A következő késleltetés időzítő áramkör szakasza használható, amely biztosítja, hogy minden alkalommal, amikor a PIR kimenet az érzékelt impulzust produkálja, az időzítő késleltetése 5-10 másodpercre meghosszabbodik, és a csatlakoztatott terhelés soha nem szakad meg a folyamat során.

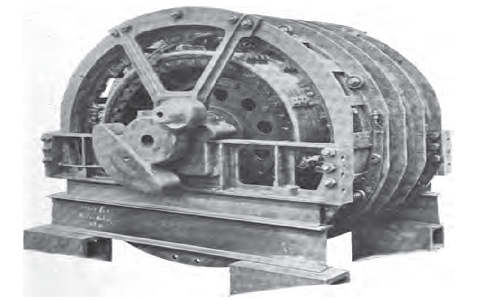
A fenti összeállításban láthatjuk azt a motort, amely elektromos hajtását a PWM / flip flop szakaszból kapja, az előző bekezdésben leírtak szerint.
A motor orsója látható egy vízszintes tengellyel összekapcsolva, amelyen a PIR be van szorítva, úgy, hogy amikor a motor elmozdul, a PIR ennek megfelelően változó radiális oda-vissza mozgáson megy keresztül.
Amíg a fenti PIR mozgás indukálódik, a zónában álló álló célpont IR-jeleit rövid alternatív impulzusok formájában detektáljuk, amelyek a PIR kék vezetékkel jelzett kimeneti tüskéjén keletkeznek.
Ezeket az impulzusokat az 1000uF kondenzátoron keresztül alkalmazzák, amely minden impulzuson feltöltődik, és biztosítja, hogy a BC547 a folyamat során megszakítás nélkül vezetési módban legyen.
A BC557 fokozatból álló relé-meghajtó reagál a BC547 kollektor fenti stabil jelére, és viszont bekapcsolva tartja a relét, amíg a PIR folyamatosan emberi jelenlétet észlel.
A relé terhelése így folyamatosan aktív marad, mivel a területen álló ember tartózkodik.
Ha azonban az emberi foglaltság megszűnik, vagy ha a cél eltávolodik a zónától, a késleltetés időzítő szakasza a relét és a terhelést az előírt 5-10 másodpercig aktiválja, majd véglegesen kikapcsol, amíg a zóna ismét be nem fog egy potenciális infravörös sugárzó forrás által.
Alkatrész lista
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K POT
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1uF / 100V
- Z1 = 15 V, 1/2 WATT
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST KAPCSOLÓ VAGY DPDT RELE
- R3, C3 valamilyen próbával és hibával kell meghatározni
FRISSÍTÉS:
A statikus emberi jelenlét kimutatására szolgáló, a fentiekben ismertetett PIR áramkör sokkal egyszerűbbé tehető egy jelszaggató áramkör alkalmazásával, amelyet a következő GIF szimuláció mutat be:
Egy alapos ellenőrzés azt mutatja, hogy valójában nem szükséges rezgésmozgás, a motor és a szecskázó penge szabadon foroghat a motor fordulatszáma alacsonyabb szinten .
Ez a tervezett statikus PIR érzékelő műveletet is hatékonyan teljesítené.

Videobemutató, amely bizonyítja a PIR statikus emberi detektálását
Előző: 3 hanggal aktivált kapcsoló áramkör magyarázata Következő: 4 egyszerű sziréna áramkör, amelyet otthon készíthet