A cikk egy egyszerű infravörös (IR) távirányító áramkört tárgyal, amely egy DC motor működtetésére van beállítva, válaszul a szokásos IR távvezérlő kézibeszélő, például TV vagy DVD távirányító kapcsolására.
A csatlakoztatott motor mindkét irányban mozgatható és leállítható.
Az áramkört a következő magyarázatokkal lehet megérteni:
Hogyan működik
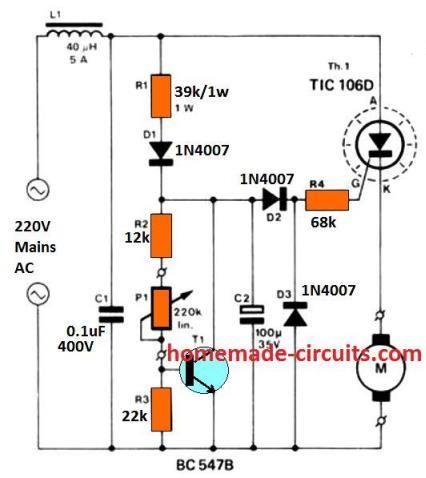
Amint az az adott kapcsolási rajzon látható, az érzékelő bármely szabványos három tűs IR érzékelő modul, amely általában bármely TV IR távoli kézibeszélőre reagál.
Ha egy IR (infravörös) sugár az érzékelőre van fókuszálva, akkor a kimenetnek kijelölt csap logikailag alacsony lesz. Ez a helyzet mindaddig fennáll, amíg a nyaláb továbbra is arra fókuszál.
A T1 tranzisztor, amely egy PNP, reagál erre a logikai alacsony jelre és kapcsolja a mellékelt RL1 relét.
Az érintkezők azonnal összekapcsolják a tranzisztor kollektoránál jelentkező pillanatnyi pozitív potenciált az IC1 flip flop-áramkörként bekötött IC1-es érintkezőjével.
Feltételezve, hogy a kezdeti logikai szekvencia az IC # 3-as érintkezőjénél van, a fenti kiváltó tényező a szekvenciát az IC # 2-es tűjére tolja, ezzel magasra emelve.
Ez bekapcsolja a T2 kapcsolót és a megfelelő RL2 relét.
Az RL2 vezeti és összeköti a motor adott vezetékét a negatív tápellátással. Mivel a motor másik kapcsa pozitívat kap az RL3-tól, elindul a beállított irányban.
Tegyük fel, hogy az érzékelő az IR távoli kézibeszélőn keresztül egy újabb triggeret kap, a fenti folyamat megismétlődik, és a kimeneti szekvencia az IC1 # 2-es és 4-es tűjére vált, amely azonnal bekapcsolja a T3-ot, miközben a T2-t kikapcsolja.
A fenti művelet visszafordítja a relés csatlakozásokat, arra kényszerítve a motort, hogy azonnal megfordítsa forgásirányát.
A távoli kézibeszélõ újabb következõ kioldásával a szekvencia visszafelé ugrik a # 3-as csapra, amely semmihez sem kapcsolódik, és a motor teljes kikapcsolását eredményezi.
Az L1, C1 felvétele biztosítja, hogy az áramköröket ne befolyásolja az érzékelő hamis indítása.
Az L1 kísérletezhet az optimális érték elérése érdekében, hogy csak véletlen kóbor külső jeleket 'alapozzon', és ne a távirányító kézibeszélőjének tényleges IR-jeit.


Alkatrészlista a fenti IR (infravörös) távvezérelt motor áramkörhöz.
R1 = 100 ohm,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0,22 uF
C5 = 1000uF / 25V
C6 = 0,22 uF
L1 = 100 mH fojtószelep
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Minden relé = 12V / 400 ohm / SPDT
érzékelő = TSOP1738
Motor = 12 V DC motor
Korábbi: NTC termisztor használata túlfeszültség-csökkentőként Következő: MJE13005 kompakt 220 V-os tápfeszültség áramkör