
Bevezetés:
Napjaink számos iparága a magas szintű teljesítménye és megbízhatósága miatt használja a robotokat, és ez nagy segítség az emberek számára. Az akadályelkerülés robotikáját az akadályok észlelésére és az ütközések elkerülésére használják. Ez egy autonóm robot. Az akadályelkerülő robot megtervezése sok érzékelő integrálását igényli feladatuknak megfelelően.
Az akadályok felismerése az elsődleges követelmény ennek az autonóm robotnak. A robot a környező területről szerzi be az információkat a robotra szerelt érzékelőkön keresztül. Néhány érzékelő eszköz, amelyet akadályok észlelésére használnak, mint például ütésérzékelők, infravörös érzékelők, ultrahangos érzékelők stb. Az ultrahangos érzékelő az akadályok észlelésére a legalkalmasabb, alacsony költségű és nagy hatótávolságú.

Akadálykerülés robotgépjármű
Működési elv:
Az akadály elkerülése robot jármű ultrahangos szenzorokat használ mozgásaihoz. A kívánt művelet eléréséhez 8051 családból álló mikrovezérlőt használnak. A motorok a motorvezérlő IC-n keresztül csatlakoznak a mikrovezérlőhöz. Az ultrahangos érzékelő a robot elé van rögzítve.
Valahányszor a robot a kívánt úton halad, az ultrahangos érzékelő folyamatosan továbbítja az ultrahang hullámait az érzékelő fejéből. Amikor egy akadály elé kerül, az ultrahangos hullámok visszatükröződnek egy objektumból, és ezt az információt továbbítják a mikrovezérlőhöz. A mikrovezérlő az ultrahangos jelek alapján vezérli a motorokat balra, jobbra, hátul, elöl. Az egyes motorok sebességének szabályozásához impulzusszélesség modulációt (PWM) használnak.

Blokkdiagram akadályok elkerülése robot jármű
Különböző érzékelők az akadály elkerülésére Robot jármű
1. Akadályfelismerés (IR érzékelő):
Az infravörös érzékelőket akadályok észlelésére használják. Az érzékelő kimeneti jele a mikrovezérlőhöz érkezik. A mikrokontroller vezérli a járművet (előre / hátra / leáll) a járműbe helyezett egyenáramú motor segítségével. Ha az IS szenzor be van helyezve a sorba, nem veszi fel a fénysugarakat, és jeleket ad a mikrovezérlőnek. A mikrovezérlő azonnal leállítja a járművet, és a sziréna bekapcsol. Egy perc elteltével a robot ellenőrzi az útvonal állapotát, ha akadályt távolítanak el, a robot messze mozog, különben a robot visszatér a kiindulási helyre. Az érzékelő rövid ultrahangos sorozat sugárzásával észleli az objektumokat, majd meghallgatja az ökot. Az érzékelő egy gazda mikrovezérlő irányítása alatt rövid, 40 kHz-es robbanást bocsát ki. Ez a robbanás a levegőben merészkedik vagy utazik, és eltalál egy cikket, majd ezt követően ismét az érzékelőhöz ugrál. Az érzékelő kimeneti impulzust ad a gazdagépnek, amely befejeződik, amikor a visszhang észlelhető, ezért az egyik impulzus szélességét a másikra egy program veszi a számításba, hogy eredményt adjon az objektum távolságáról.
két. Útfelismerés (közelségérzékelő):
A normális oka, hogy mind az érzékelők, mind az iránymutatások és a robot követik, egyenesen haladnak az úton. Amikor a vonal ekkor véget ér, a robot 180-nál hátramegy, és ugyanazon a helyen visszafordul.

On-line
A közelségi szenzorokat az út felismerésére használják. Ha a görbe vonalában nem érzékelhető a jobb oldali érzékelő, a mikrovezérlő aktiválja a bal motort, hogy balra forduljon, amíg a jobb oldali érzékelőtől érkezik a jel. Miután a jel észlelte a jobb érzékelőt, a két motor aktiválódik, hogy haladjon előre. Amikor a vonal ekkor véget ér, a robot 180-nál hátramegy, és ugyanazon a helyen visszafordul.

A vonal elvesztése
3. Ultrahangos érzékelő:
Az ultrahangos érzékelőt akadályok észlelésére használják. Az ultrahangos érzékelő továbbítja az ultrahang hullámait az érzékelő fejéből, és ismét fogadja az objektumtól visszaverődő ultrahangos hullámokat.
Számos alkalmazás használ ultrahangos érzékelőket, például utasítás riasztórendszereket, automatikus ajtónyitókat stb. Az ultrahangos érzékelő nagyon kompakt és nagyon nagy teljesítményű.

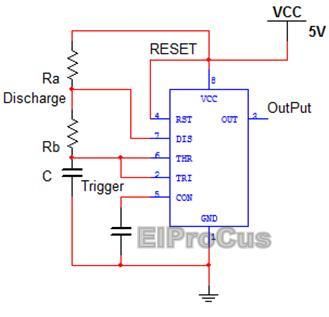
Ultrahangos érzékelő általános rajza
Működési elv:
Az ultrahangos érzékelő a rövid és nagyfrekvenciás jelet bocsátja ki. Ezek a hang sebességével terjednek a levegőben. Ha bármilyen tárgyat eltalálnak, akkor visszhangot jeleznek az érzékelő felé. Az ultrahangos érzékelő az alaphoz rögzített multivibrátorból áll. A multivibrátor egy rezonátor és egy vibrátor kombinációja. A rezonátor a rezgés által generált ultrahangos hullámot juttatja el. Az ultrahangos érzékelő két részből áll, az emitter 40 kHz-es hanghullámot produkál, az érzékelő pedig 40 kHz-es hanghullámot érzékel és elektromos jelet küld vissza a mikrovezérlőnek.

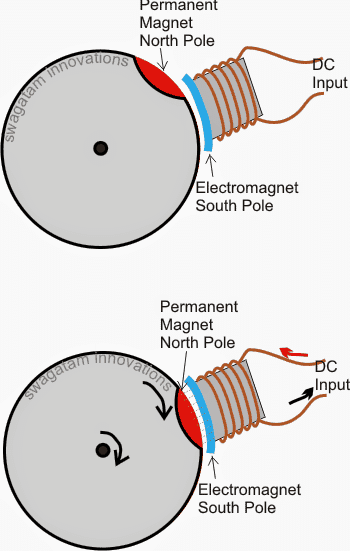
Ultrahangos működési elv
Az ultrahangos érzékelő lehetővé teszi a robot számára, hogy virtuálisan lásson és felismerjen egy tárgyat, elkerülje az akadályokat, mérje a távolságot. Az ultrahangos érzékelő működési tartománya 10-30 cm.
Az ultrahangos érzékelő működése:
Ha nagyfeszültségű elektromos impulzust adunk az ultrahangos jelátalakítóra, az egy adott frekvenciaspektrumban rezeg és hanghullámok sorozatát generálja. Amikor az ultrahangos érzékelő elé bármilyen akadály érkezik, a hanghullámok visszhangként visszaverődnek és elektromos impulzust generálnak. Kiszámítja a hanghullámok küldése és a visszhang fogadása közötti időt. A visszhangmintákat összehasonlítjuk a hanghullámok mintáival, hogy meghatározzuk az észlelt jel állapotát.
Jegyzet: Az ultrahangos vevőnek érzékelnie kell az ultrahangos adó jelét, miközben az adóhullámok eltalálják a tárgyat. E két érzékelő kombinációja lehetővé teszi a robot számára, hogy észlelje az útjában lévő tárgyat. Az ultrahangos érzékelő a robot elé van rögzítve, és ez az érzékelő is segíti a robotot az épület bármelyik halljában való eligazodásban.
Az ultrahangos érzékelő alkalmazásai:
- A közlekedési jelek automatikus váltása
- Behatoló riasztórendszer
- Számláló műszerek hozzáférés kapcsolók parkolóóra
- Autók hátsó szonárja
Az ultrahangos érzékelő jellemzői:
- Kompakt és könnyű
- Nagy érzékenység és nagy nyomás
- Magas megbízhatóság
- 20mA energiafogyasztás
- Impulzus be / ki kommunikáció
- Keskeny elfogadási szög
- Pontos, érintés nélküli elválasztási becsléseket ad 2 cm és 3 m között
- A robbanáspont LED jelzi az előrejelzés becsléseit
- A 3 tűs fejléc egyszerűvé teszi a csatlakozást egy szervo fejlesztői link használatával
Az akadályok elkerülésére szolgáló robot járművek alkalmazásai:
- Különösen a katonai alkalmazások
- Városi háborúkhoz használható
Most egyértelműen képet kaptunk a robot jármű koncepciójáról az akadályok észlelésének ultrahangos érzékelőjével, ha további további kérdések merülnének fel ebben a témában, vagy az elektromos és elektronikus projektek koncepciójáról az alábbiak.
Photo Credit:
- Ultrahangos érzékelő általános rajza Letsmakerobots
- Az ultrahangos érzékelő működési elve Mikroszonikus








{kind=link}