A modern világban robot fontos szerepet játszik . A robot fő célja az ember erejének csökkentése. A robotokat számos alkalmazásban használják az elektronikában. Ebben a cikkben megvitattuk, hogyan lehet robotot építeni az Arduino modullal és a 8051 mikrovezérlővel. Ahhoz, hogy robotot építsünk az Arduino-val, elmagyarázzuk az arduino robotot az akadálykerüléssel. A szükséges alkatrészek közé tartozik a robot teste, az egyenáramú motor, az ultrahangos érzékelő, az Arduino modul, a motorvezérlő IC és az Arduino modul
Hogyan lehet robotot építeni?
A szükséges alkatrészeket a robot felépítése a következőket tartalmazza
Robot test
A robot alapvető teste az akadálykerülés robotja a következő képen látható. A robot test műanyag test, és mindkét oldalán kerekeket tartalmaz. A robot teste előtt az ultrahangos érzékelő van elrendezve. Az ultrahangos érzékelő használatával az akadály képes felismerni. Ha a robot mozog, ha az ultrahangos érzékelő bármilyen akadályt észlel, akkor a robot félrelép és tovább mozog.

Robot test
DC motor
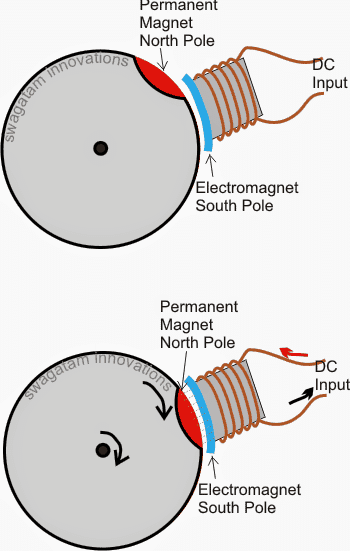
A Az egyenáramú motor elektromos motor és egyenáramú villamos energiával működik. Bármely elektromos motor működése az elektromágnesességen alapul. A mágneses teret az áramvezető vezető hozza létre, amikor külső mágneses mezőbe helyezi, a vezető áramával arányos erőt fog tapasztalni. Általában tudjuk, hogy a mágnesek ellentétes polaritási vonzerővel bírnak északról délre, és ha a polaritások megegyeznek északról északra és délről délre, akkor a mágnesek taszítani fognak.

DC motor
Az egyenáramú motor belső konfigurációját úgy tervezték, hogy rögzítse az áramot vezető és a külső mágneses mező közötti mágneses kölcsönhatást a mozgás előidézésére. Ebben két egyenáramú motort használunk, mindegyik motor 6v-ot, a két DC-motor pedig 12v-t tartalmaz. A két egyenáramú motor a robot testébe kerül, amelyet a következő képen figyelhetünk meg. A robot testét az egyenáramú motorok mozgatják

Robot test DC motorral
Arduino modul
A következő kép az arduino modul képét mutatja. A arduino modul fontos szerepet játszik az akadályelkerülő robot tervezésében az arduino készlet használatával. Az arduino vevőkészüléke csatlakozik az ultrahangos érzékelő második érintkezőjéhez, az arduino modul 1., 2. és 3. tűje pedig a DC motor meghajtójához. Az általános komponensek kondenzátora és diódája az arduino modulhoz is csatlakozik az akkumulátor tápegységének segítségével.

Arduino modul
Motorvezérlő IC
Az egyenáramú motor működtetéséhez a motorvezérlő IC használt. A motormeghajtó 3,6 és 11, 14 csapjai az egyenáramú motorhoz vannak csatlakoztatva. Az 1. és 2. bemeneti tű az arduino modulhoz, az engedélyező tű pedig az arduino adó tűjéhez csatlakozik. A motorvezérlő 4, 5, 12, 13 csapjai a földhöz vannak csatlakoztatva.

Motorvezérlő IC
Ultrahangos érzékelő
Ebben a koncepcióban az ultrahangos érzékelő egy előttünk álló akadály észlelésére szolgál, és elküldi a parancsot az arduino táblára. A bemeneti jeltől függően a mikrovezérlő átirányítja a robotot, hogy váltakozó irányban mozogjon.

Ultrahangos érzékelő
Az arduino robot akadálykerülés alkalmazásai
- Az arduino robot bármilyen felületen mozoghat
- Fémes felületen mozoghat, mint a hűtőszekrény háza.
Az alábbi képen az arduino robot látható az akadályok elkerülésére

Arduino robot az akadályok elkerülésére
Robotot építeni vele a 8051 mikrovezérlő elmagyarázzuk a fémdetektoros robotjárművet. A robotnak a 8051 mikrovezérlővel történő felépítéséhez szükséges alkatrészek a következők
- 8051 mikrovezérlő
- DC motorok
- Motorvezetők
- Fémdetektor
- Dekóder
- Encoder
- Nyomógombok
- Kristály
- RF adó és vevő
Fémdetektor
A fémdetektor tekercs, amelynek egy vagy több fémtekercse van a fémek talajon történő kimutatására. A fémdetektor az elektromágneses indukció elvén működik. A fémdetektor a PCB-n keresztül csatlakozik a robot testéhez, amelyet az utolsó képen megfigyelhetünk. A következő kép az elektronikus projektekben használt általános fémdetektorot mutatja.

Fémdetektor
Nyomógombok
A nyomógombok olyan gombok, amelyek kemény fémekből állnak, például műanyagból vagy fémből. Általában a nyomógombokkal lehet visszaállítani a programot a mikrovezérlőben. A következő képen a nyomógomb képe látható.

Nyomógomb
8051 mikrokontroller
A A 8051 mikrokontroller 40 csapból áll . A mikrovezérlő 4. és 5. csapja a kristályoszcillátorhoz csatlakozik. A Vcc tű az 5 V tápegységéhez kerül, és a földelő csap a földhöz csatlakozik. A mikrovezérlő 15, 16, 18, 19 csapjai a HT12E IC kódolójához vannak csatlakoztatva. A mikrokontroller 2, 7, 8, 9 csapjai a nyomógombokhoz vannak csatlakoztatva.
A következő kép az összes alkatrész, például ellenállás, kondenzátor, kristályoszcillátor, 8051 sorozatú mikrovezérlő, kódolók stb. Csatlakoztatása után bekapcsolva a nyomtatott áramköri lap .

NYÁK-csatlakozások
Az alábbi képen látható a fémdetektoros robot a 8051-es sorozatú mikrovezérlővel.

Fémdetektoros robot a 8051-es sorozatú mikrovezérlővel
Ebben a cikkben megvitattuk a Hogyan lehet robotot építeni az arduino és a 8051 mikrokontrollerrel . Remélem, hogy a cikk elolvasásával alapvető ismereteket szerzett egy robot felépítéséhez. Ha bármilyen kérdése van ezzel a cikkel vagy az elektronikával és kommunikációs projektek , nyugodtan kommenteljen az alábbi részben. Itt van a kérdés az Ön számára, Mi az a 8051-es sorozatú mikrovezérlő?
.