
Szinte minden olyan mechanikai fejlesztést, amelyet körülöttünk látunk, elektromos motor hajtja végre. Az elektromos gépek az energia átalakításának módszerei. A motorok elektromos energiát vesznek fel és mechanikai energiát termelnek. Az elektromos motorokat több száz eszköz táplálásához használják, amelyeket a mindennapi életben használunk. Az elektromos motorokat nagyjából két különböző kategóriába sorolják: egyenáramú motor és váltakozó áramú motor. Ebben a cikkben az egyenáramú motort és annak működését fogjuk megvitatni. És azt is, hogy a váltóáramú egyenáramú motorok hogyan működnek.
Mi az egyenáramú motor?
NAK NEK Az egyenáramú motor elektromos motor amely egyenárammal működik. Egy villanymotorban a működés egyszerű elektromágnesességtől függ. Az áramot vezető vezető mágneses teret generál, amikor ezt egy külső mágneses mezőbe helyezzük, akkor a vezető áramával és a külső mágneses tér erősségével arányos erővel találkozik. Ez egy olyan eszköz, amely átalakítja az elektromos energiát mechanikai energiává. Azon dolgozik, hogy a mágneses mezőbe helyezett áramvezető vezető olyan erőt tapasztal, amely miatt az eredeti helyzetéhez képest forog. A gyakorlati egyenáramú motor terepi tekercsekből áll, amelyek biztosítják a mágneses fluxust és az armatúrát, amelyek vezetőként működnek.

Kefe nélküli egyenáramú motor
A bemenet kefe nélküli egyenáramú motor áram / feszültség és kimenete nyomaték. Az egyenáramú motor működésének megértése nagyon egyszerű az alábbiakban bemutatott alapdiagram alapján. Az egyenáramú motor alapvetően két fő részből áll. A forgó részt rotornak, az álló részt pedig állórésznek nevezzük. A rotor az állórészhez képest forog.
A rotor tekercsekből áll, a tekercsek elektromosan kapcsolódnak a kommutátorhoz. A kefék, a kommutátor érintkezőinek és a rotor tekercselésének geometriája olyan, hogy áramellátáskor az áramellátott tekercs és az állórész mágnesének polaritása rosszul illeszkedik, és a rotor addig forog, amíg az állórész terepi mágnesével nagyon majdnem kiegyenesedik.
Amint a rotor eléri az igazodást, a kefék a következő kommutátor érintkezőkhöz lépnek, és a következő tekercset feszültség alá helyezik. A forgás megfordítja az áram irányát a rotor tekercselésén keresztül, ami a forgórész mágneses mezőjének megfordulását idézi elő, és tovább hajtja.
DC motor felépítése
Az egyenáramú motor felépítése az alábbiakban látható. Nagyon fontos ismerni annak kialakítását, mielőtt tudnánk, hogy működik. A motor elengedhetetlen része az armatúra és az állórész.

DC motor
Az armatúra tekercs forgó rész, míg az álló rész az állórész. Ebben az armatúra tekercs az egyenáramú tápellátás felé van csatlakoztatva, amely magában foglalja a keféket és a kommutátorokat is. A kommutátor fő feladata az AC váltása DC-vé, amelyet az armatúra indukál. Az áram áramlását a kefe segítségével lehet biztosítani a motor forgórészétől az inaktív külső terhelés felé. Az armatúra elrendezése történhet az elektromágnes két pólusa között vagy állandó.
DC motor alkatrészek
Az egyenáramú motorokban különböző népszerű motorok állnak rendelkezésre, mint például kefe nélküli, állandó mágnes, sorozat, összetett tekercs, sönt, egyébként stabilizált sönt. Általánosságban elmondható, hogy az egyenáramú motor részei megegyeznek ezekben a népszerű kivitelekben, de ennek teljes működése megegyezik. Az egyenáramú motor fő részei a következőket tartalmazzák.
Állórész
Az állórész, mint az állórész, az egyenáramú motor alkatrészeinek egyik része, amely magában foglalja a terepi tekercseket. Ennek fő feladata az utánpótlás megszerzése.
Forgórész
A rotor a motor dinamikus része, amelyet az egység mechanikai fordulatainak létrehozására használnak.
Ecsetek
A kommutátort használó kefék főleg hídként működnek az álló elektromos áramkörnek a rotor felé történő rögzítéséhez.
Kommutátor
Ez egy hasított gyűrű, amelyet réz szegmensekkel terveztek. Ez az egyenáramú motor egyik leglényegesebb része.
Terepi tekercselések
Ezek a tekercsek rézhuzalként ismert mezõtekercsekkel készülnek. Ezek a tekercsek kb. A rúdcipőn átmenő réseket körözik.
Armatúra tekercselések
Ezeknek a tekercseknek a felépítése az egyenáramú motorban kétféle, például a Lap & Wave.
Iga
A mágneses keretet, mint egy igát, néha öntöttvasból vagy acélból terveznek. Úgy működik, mint egy őr.
Lengyelek
A motor pólusai két fő részt tartalmaznak, mint például a rúdmag, valamint a rúdcipők. Ezek a nélkülözhetetlen részek hidraulikus erővel vannak összekapcsolva, és csatlakoznak az igához.
Fogak / rés
A nem vezető résbetéteket gyakran a rések falai közé szorítják, valamint tekercseket a semmiből való biztonság, a mechanikai támaszték és a további elektromos szigetelés érdekében. A rések közötti mágneses anyagot fognak nevezzük.
Motorház
A motor háza támogatja a keféket, a csapágyakat és a vasmagot.
Működési elv
Az elektromos gépet, amelyet az elektromos energiából mechanikává alakítanak, egyenáramú motornak nevezzük. A DC motor működési elve az, hogy amikor egy áramvezető vezető a mágneses mezőben helyezkedik el, akkor mechanikai erőt tapasztal. Ez az erőirány Flemming balkezes szabálya, valamint nagysága alapján dönthető el.
Ha az első ujját kinyújtjuk, a második ujj, valamint a bal kéz hüvelykujja függőleges lesz egymással szemben, és az elsődleges ujj a mágneses mező irányát, a következő ujj az aktuális irányt, a harmadik ujj-szerű hüvelykujj pedig a vezetőn keresztül tapasztalt erőirány.
F = BIL Newton
Hol,
„B” a mágneses fluxus sűrűsége,
Az ’én’ aktuális
’L’ a vezető hossza a mágneses mezőben.
Amikor egy armatúra tekercset kap egy egyenáramú tápellátás felé, akkor az áram áramlása a tekercsen belül létrejön. Terepi tekercselés vagy állandó mágnesek biztosítják a mágneses teret. Tehát az armatúravezetők a fent említett elv alapján mágneses mező miatt erőt fognak tapasztalni.
A kommutátor úgy van kialakítva, mint a szakaszok, hogy elérjék az egyirányú nyomatékot, vagy az erő útja minden alkalommal felborult volna, ha a vezető mozgásának útja felfordul a mágneses mezőben. Tehát ez a DC motor működési elve.
Az egyenáramú motorok típusai
Az egyenáramú motorok különféle típusait az alábbiakban tárgyaljuk.
Fogaskerekes DC motorok
A hajtóműves motorok hajlamosak csökkenteni a motor fordulatszámát, de a nyomaték megfelelő növekedésével. Ez a tulajdonság jól jön, mivel az egyenáramú motorok túl nagy sebességgel tudnak forogni ahhoz, hogy egy elektronikus eszköz használni tudja. A fogaskerekes motorok általában egyenáramú kefemotorból és a tengelyhez rögzített sebességváltóból állnak. A motorokat két összekapcsolt egység különbözteti meg hajtóművként. Számos alkalmazással rendelkezik a tervezési költségek miatt, csökkenti az alkalmazások, például az ipari berendezések, működtetők, orvosi eszközök és robotika összetettségét és kivitelezését.
- Soha nem lehet jó robotot építeni fogaskerekek nélkül. Mindent figyelembe véve nagyon fontos annak megértése, hogy a sebességváltók hogyan befolyásolják az olyan paramétereket, mint a nyomaték és a sebesség.
- A fogaskerekek a mechanikai előny elvén működnek. Ez azt jelenti, hogy megkülönböztető fogaskerék-átmérők használatával tudunk váltani a forgási sebesség és a nyomaték között. A robotoknak nincs kívánatos sebesség / nyomaték aránya.
- A robotikában a nyomaték jobb, mint a sebesség. Fogaskerekekkel jobb nyomatékkal lehet cserélni a nagy sebességet. A nyomaték növekedése fordítottan arányos a sebesség csökkenésével.

Fogaskerekes DC motorok
Sebességcsökkentés a sebességfokozatú egyenáramú motorban
A sebességfokozat csökkentése abból áll, hogy egy kis sebességfokozat nagyobb sebességet hajt. Lehet, hogy ezeknek a reduktor-készleteknek kevés szettje van egy reduktorban.

Sebességcsökkentés a hajtott DC motorban
Néha a sebességváltó motor használatának célja a motor forgótengely-fordulatszámának csökkentése a hajtott eszközben, például egy kis elektromos órában, ahol az apró szinkron motor 1200 fordulat / perc fordulatszámon fordulhat, azonban a hajtáshoz egy fordulatra csökken. a másodpercmutatót, és tovább csökkentette az óra mechanizmusában a perc- és óramutatók mozgatásához. Itt a hajtóerő mennyisége lényegtelen, amennyiben elegendő az óra mechanizmusának súrlódási hatásainak leküzdéséhez.
Sorozatú egyenáramú motor
A Series motor egy DC sorozatú motor, ahol a terepi tekercselés belsőleg sorosan kapcsolódik az armatúra tekercseléséhez. A sorozat motorja nagy indítónyomatékot biztosít, de soha nem szabad terhelés nélkül járni, és az első áramellátáskor nagyon nagy tengelyterheléseket képes mozgatni. A sorozat motorjai sorozat tekercselt motorként is ismertek.
Sorozatmotorokban a terepi tekercsek sorba vannak kapcsolva az armatúrával. A térerősség az armatúra áramának progressziójától függ. Abban az időben, amikor a terhelés csökkenti a sebességét, a sorozat motorja kiválóbb nyomatékot képes elérni. Indítási nyomatéka több, mint a különböző típusú egyenáramú motorok.
Könnyebben sugározhatja azt a hőt is, amely a tekercsben felhalmozódott a nagy mennyiségű áram miatt. Sebessége jelentősen eltolódik a teljes terhelés és a terhelés nélküli között. A terhelés eltávolításakor a motor sebessége növekszik, és az armatúrán és a terepi tekercseken átáramló áram csökken. A nagy gépek terheletlen működése veszélyes.

Motor sorozat
Az armatúrán és a terepi tekercseken keresztüli áram csökken, a körülöttük lévő fluxus vonalak erőssége gyengül. Ha a tekercsek körüli fluxusvonalak erőssége ugyanolyan ütemben csökken, mint a rajtuk átfolyó áram, akkor mindkettő azonos sebességgel csökken
amelyet a motor fordulatszáma növel.
Előnyök
A sorozatmotor előnyei a következők.
- Hatalmas indítónyomaték
- Egyszerű konstrukció
- A tervezés egyszerű
- A karbantartás egyszerű
- Költséghatékony
Alkalmazások
A Series Motorok óriási fordulatot képesek biztosítani, a nyomatékot alapjáratából. Ez a tulajdonság teszi a sorozatmotorokat alkalmassá kis elektromos készülékekhez, sokoldalú elektromos berendezésekhez stb. A sorozatú motorok nem megfelelőek, ha állandó fordulatszámra van szükség. Ennek oka az, hogy a soros motorok sebessége változó terhelés mellett nagyban változik.
Shunt Motor
A söntmotorok sönt egyenáramú motorok, ahol a terepi tekercsek a motor armatúra tekercseléséhez tolódnak vagy párhuzamosan kapcsolódnak. A shunt DC motort általában a legjobb sebességszabályozás miatt használják. Ezért az armatúra tekercselésének és a terepi tekercselésnek is ugyanaz a tápfeszültsége, de vannak különálló ágai az armatúraáram és a terepi áram számára.
A söntmotor némileg megkülönböztető működési jellemzőkkel rendelkezik, mint egy soros motor. Mivel a söntmező tekercs finom huzalból készül, nem képes nagy áramot produkálni az indításhoz, mint a sorozatmező. Ez azt jelenti, hogy a söntmotor rendkívül alacsony indítónyomatékkal rendelkezik, ami megköveteli, hogy a tengelyterhelés meglehetősen kicsi legyen.

Shunt Motor
Amikor a sönt motorra feszültséget kapcsolunk, a sönt tekercsen nagyon alacsony áram folyik át. A söntmotor armatúrája hasonló a sorozatmotorhoz, és áramot von, hogy erős mágneses teret hozzon létre. Az armatúra körüli mágneses mező és a söntmező körül keletkező mező kölcsönhatása miatt a motor forogni kezd.
A sorozat motorjához hasonlóan, amikor az armatúra forogni kezd, akkor visszanyeri az EMF-et. A hátsó EMF hatására az armatúrában lévő áram nagyon kicsi szintre kezd csökkenni. Az armatúra által felvett áram mennyisége közvetlenül függ a terhelés nagyságától, amikor a motor eléri a teljes fordulatszámot. Mivel a terhelés általában kicsi, az armatúra áram kicsi lesz.
Előnyök
A söntmotor előnyei a következők.
- Egyszerű vezérlési teljesítmény, amely nagyfokú rugalmasságot eredményez az összetett meghajtási problémák megoldásában
- Magas rendelkezésre állás, ezért minimális szervizerő szükséges
- Magas szintű elektromágneses kompatibilitás
- Nagyon sima futás, ezért az egész rendszer alacsony mechanikai igénybevétele és magas dinamikus szabályozási folyamatok
- Széles szabályozási tartomány és alacsony fordulatszám, ezért univerzálisan használható
Alkalmazások
A sönt DC motorok nagyon alkalmasak szíjhajtású alkalmazásokra. Ezt az állandó fordulatszámú motort ipari és autóipari alkalmazásokban használják, például szerszámgépekben és tekercselő / letekercselő gépekben, ahol nagy a nyomaték pontossága.
DC összetett motorok
Az egyenáramú összetett motorok külön gerjesztett söntmezőt tartalmaznak, amelynek kitűnő indítónyomatéka van, azonban a változó fordulatszámú alkalmazásoknál gondokkal szembesül. Ezeknek a motoroknak a mezője sorba kapcsolható az armatúrán keresztül, valamint egy külön gerjesztett sönt mező. A sorozatmező kiemelkedő kezdőnyomatékot ad, míg a söntmező fokozott sebességszabályozást biztosít. De a sorozat mező vezérlési problémákat okoz a változó sebességű meghajtók alkalmazásaiban, és általában nem használják a négyszögletes meghajtókban.
Külön izgatott
Ahogy a neve is mutatja, a terepi tekercsek különben egy külön egyenáramú forráson keresztül kapnak energiát. Ezeknek a motoroknak az az egyedülálló ténye, hogy az armatúraáram nem szolgáltatja az egész terepi tekercset, mert a terepi tekercset külön külső DC áramforrásból erősítik. Az egyenáramú motor nyomatékegyenlete Tg = Ka φ Ia, Ebben az esetben a nyomaték megváltozik a „φ” iktatott fluxus megváltoztatásával és függetlenül az „Ia” armatúra áramától.
Ön izgatott
Ahogy a neve is mutatja, ebben a motortípusban a tekercsek áramát a motoron keresztül lehet továbbítani. Ezenkívül ezt a motort szétválasztják a soros tekercses és a sönt tekercselt motorra.
Állandó mágnes DC motor
A PMDC vagy állandó mágneses egyenáramú motor armatúra tekercselést tartalmaz. Ezeket a motorokat állandó mágnesekkel tervezték úgy, hogy az állórész magának belső szélére helyezték őket a tér fluxusának előállításához. Másrészt a rotor tartalmaz egy hagyományos egyenáramú armatúrát, amely magában foglalja a keféket és a kommutátor szegmenseket.
Állandó mágnesű egyenáramú motorban a mágneses mező állandó mágnesen keresztül képezhető. Tehát a bemeneti áramot nem használják gerjesztésre, amelyet légkondicionálók, ablaktörlők, autóindítók stb.
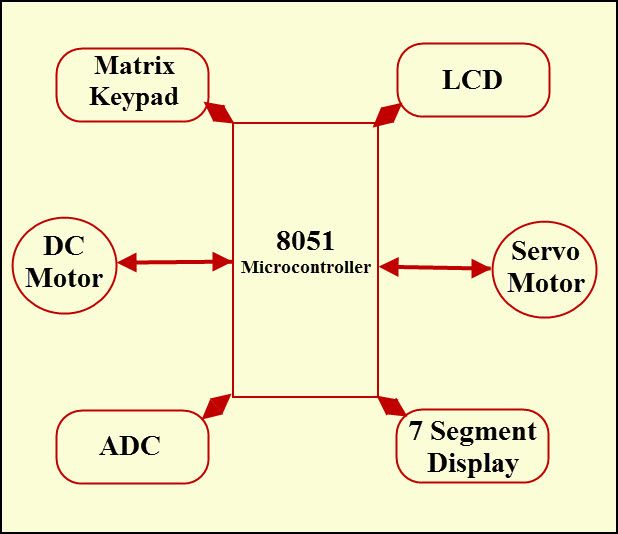
DC motor csatlakoztatása mikrovezérlővel
A mikrovezérlők nem tudják közvetlenül meghajtani a motorokat. Tehát valamilyen vezetőre van szükségünk, hogy szabályozzuk a motorok sebességét és irányát. A motorvezérlők összekötő eszközként fognak működni mikrovezérlők és motorok . A motorvezérlők áramerősítőként fognak működni, mivel alacsony áramú vezérlőjelet vesznek fel, és nagy áramerősségű jelet adnak. Ezt a nagy áramerősségű jelet használják a motorok meghajtására. Az L293D chip használata egyszerű módja a motor mikrokontrollerrel történő vezérlésének. Két H-híd meghajtó áramkört tartalmaz belülről.
Ezt a chipet két motor vezérlésére tervezték. Az L293D kétféle elrendezéssel rendelkezik, ahol 1 készlet rendelkezik 1. bemenettel, 2. bemenettel, 1. kimenettel, 2. kimenettel, engedélyező tűvel, míg egy másik készlet 3. bemenettel, 4. bemenettel, 3. kimenettel, 4. kimenettel rendelkezik más engedélyező tűvel. Itt van az L293D-hez kapcsolódó videó
Itt van egy példa egy egyenáramú motorra, amely kapcsolódik az L293D mikrovezérlőhöz.

DC motor kapcsolódik az L293D mikrovezérlőhöz
Az L293D kétféle elrendezéssel rendelkezik, ahol az egyik halmaz 1. bemenettel, 2. bemenettel, 1. kimenettel és 2. kimenettel rendelkezik, egy másik készlet pedig 3., 4., 3. és 4. kimenettel rendelkezik a fenti ábra szerint,
- Ha a 2. és 7. tű magas, akkor a 3. és 6. tű is magas. Ha az 1 engedélyezés és a 2-es csap magas, a 7-es tű alacsonyan van, akkor a motor előre forog.
- Ha az 1 engedélyezés és a 7-es tű magas, a 2-es tű olyan alacsony, hogy a motor fordított irányban forog.
Napjainkban az egyenáramú motorok számos olyan alkalmazásban megtalálhatók, mint a játékok és a lemezmeghajtók, vagy az acélhengerművek és papírgépek üzemeltetéséhez nagy méretűek.
DC motoregyenletek
A tapasztalt fluxus nagysága
F = BlI
Ahol, B- A terepi tekercsek által előállított fluxus miatti fluxussűrűség
l- A vezető aktív hossza
A vezetőn áthaladó I-áram
A vezető forgásakor olyan EMF indukálódik, amely a táplált feszültséggel ellentétes irányban hat. Adva van

Hol, Ø- Fluz a terepi tekercselések miatt
P- Pólusok száma
A-A állandó
N - A motor fordulatszáma
Z- Vezetékek száma
A tápfeszültség, V = Eb+ Inak nekRnak nek
A kifejlesztett nyomaték az
 Így a nyomaték egyenesen arányos az armatúra árammal.
Így a nyomaték egyenesen arányos az armatúra árammal.
Ezenkívül a fordulatszám az armatúra árama szerint változik, ezért közvetetten a motor nyomatéka és sebessége függ egymástól.
Egyenáramú söntmotor esetén a fordulatszám akkor is állandó marad, ha a nyomaték terhelés nélküli teljes terhelésre növekszik.
Egy DC sorozatú motor esetében a fordulatszám csökken, mivel a nyomaték terhelés nélkül teljes terhelésre növekszik.
Így a nyomaték a sebesség változtatásával szabályozható. A sebességszabályozást azáltal is elérhetjük
- A fluxus megváltoztatása az áram vezérlésével a mező tekercselésével - Flux Control módszer. Ezzel a módszerrel a sebességet a névleges sebesség felett szabályozzák.
- Armatúra feszültségszabályozás - A normál sebesség alatti fordulatszám-szabályozást biztosít.
- Tápfeszültség-szabályozás - Sebességszabályozást biztosít mindkét irányban.
4 Négyzet művelet
Általában egy motor 4 különböző régióban működhet. A az egyenáramú motor négyszögletes működése a következőket tartalmazza.
- Motorként előre vagy az óramutató járásával megegyező irányban.
- Generátorként előrefelé.
- Motorként hátramenetben vagy balra.
- Generátorként fordított irányban.

4 Az egyenáramú motor négyzetes működése
- Az első negyedben a motor pozitív sebességgel és nyomatékkal hajtja a terhelést.
- A második negyedben a nyomaték iránya megfordul, és a motor generátorként működik
- A harmadik negyedben a motor negatív irányban hajtja a terhelést sebességgel és nyomatékkal.
- A 4thkvadráns, a motor fordított üzemmódban generátorként működik.
- Az első és a harmadik negyedben a motor előre és hátramenetben egyaránt hat. Például darukban lévő motorok a teher felemeléséhez és letételéhez is.
A második és a negyedik negyedben a motor előremenő és hátramenetben generátorként működik, és energiát juttat vissza az áramforráshoz. Így a motor működésének vezérlése, a 4 negyed bármelyikében történő működésének vezérlése a sebesség és a forgásirány szabályozásával történik.
A sebességet az armatúra feszültségének változtatásával vagy a mező gyengítésével lehet szabályozni. A nyomaték irányát vagy a forgásirányt annak szabályozásával lehet változtatni, hogy az alkalmazott feszültség nagyobb-e vagy kisebb, mint a hátsó emf.
Gyakori hibák a DC motorokban
Fontos tudni és megérteni a motor meghibásodásait és hibáit, hogy leírjuk a minden esetre legmegfelelőbb biztonsági berendezéseket. Három típusú motorhiba létezik, mint például mechanikus, elektromos és mechanikus, amelyek elektromosra nőnek. A leggyakrabban előforduló hibák a következők:
- A szigetelés meghibásodása
- Túlmelegedés
- Túlterhelések
- A csapágy meghibásodása
- Rezgés
- Zárt rotor
- A tengely eltérése
- Fordított futás
- A fázis egyensúlyhiánya
A váltakozó áramú motorok, valamint az egyenáramú motorok leggyakoribb hibái a következőket tartalmazzák.
- Ha a motor nincs megfelelően felszerelve
- Amikor a motort szennyeződés okozza
- Amikor a motor vizet tartalmaz
- Amikor a motor túlmelegszik
12 V DC motor
A 12 V-os egyenáramú motor olcsó, kicsi és nagy teljesítményű, amelyet számos alkalmazásban használnak. A megfelelő egyenáramú motor kiválasztása egy adott alkalmazáshoz kihívást jelentő feladat, ezért nagyon fontos, hogy a pontos vállalaton dolgozzon. A motorokra a legjobb példa a METMotors, mivel több mint 45 éve gyártják a PMDC (állandó mágneses egyenáramú) motorokat.
Hogyan válasszuk ki a megfelelő motort?
A 12 V-os motor kiválasztása nagyon egyszerűen elvégezhető a METmotorokon keresztül, mivel ennek a cégnek a szakemberei először megvizsgálják az Ön megfelelő alkalmazását, majd számos jellemzőt és specifikációt figyelembe vesznek, hogy garantálják, hogy a lehető legfinomabb termékkel végez.
Az üzemi feszültség ennek a motornak az egyik jellemzője.
Ha a motort akkumulátorral hajtják, akkor általában alacsony üzemi feszültséget választanak, mivel kevesebb cellára van szükség az adott feszültség eléréséhez. De nagy feszültség mellett az egyenáramú motor hajtása általában hatékonyabb. Annak ellenére, hogy működése 1,5 V-os feszültséggel érhető el, amely felmegy 100 V-ra. A leggyakrabban használt motorok a 6v, 12v és 24v. A motor további fő jellemzői: fordulatszám, üzemi áram, teljesítmény és nyomaték.
A 12 V-os egyenáramú motorok tökéletesek különböző alkalmazásokhoz egyenáramú tápellátás révén, amelyhez forgatónyomatékra és nagy indításra van szükség. Ezek a motorok kevesebb fordulatszámon működnek, mint a többi motorfeszültség.
Ennek a motornak a jellemzői főleg a gyártó cégtől és az alkalmazástól függően változnak.
- A motor fordulatszáma 350 és 5000 ford / perc között van
- A motor névleges nyomatéka 1,1 és 12,0 font között mozog
- Ennek a motornak a kimenő teljesítménye 01 LE és 21 LE között mozog
- A keretméretek 60 mm, 80 mm, 108 mm
- Cserélhető kefék
- Az ecset tipikus élettartama 2000+ óra
Vissza EMF DC motorban
Miután az áramvezető vezető el van helyezve egy mágneses mezőben, akkor a nyomaték kiváltja a vezetőt, és a nyomaték elforgatja azt a vezetőt, amely szeleteli a mágneses mező fluxusát. Az elektromágneses indukció jelensége alapján, ha a vezető felvágja a mágneses teret, akkor az EMF indukál a vezetőn belül.
Az indukált EMF irány Flemming jobbkezes szabályával határozható meg. E szabály szerint, ha 90 ° -os szöggel megfogjuk indexképünket, mutató- és középső ujjunkat, akkor a mutatóujj jelzi a mágneses mező útját. Itt a hüvelykujj a vezető mozgásának módját, a középső ujja pedig a vezető fölött indukált EMF-et jelöli.
Flemming jobboldali szabályának alkalmazásával észrevehetjük, hogy az indukált emf irány fordított az alkalmazott feszültséghez képest. Tehát az emf-et hátsó emf-nek vagy counter-emf-nek hívják. A hátsó emf kifejlesztése sorozatosan történhet az alkalmazott feszültségen keresztül, azonban fordított irányban, vagyis a hátsó emf ellenáll az azt okozó áramlásnak.
A hátsó emf nagysága megadható egy hasonló kifejezéssel, mint például az alábbiak.
Eb = NP = Z / 60A
Hol
Az „Eb” a motor által indukált EMF, az úgynevezett Back EMF
’A’ a nem. párhuzamos sávok az armatúrán a fordított polaritású kefék között
’P’ a nem. oszlopok
’N’ a sebesség
A „Z” a vezetők teljes száma az armatúrán belül
A ’ϕ’ minden pólus számára hasznos fluxus.
A fenti áramkörben a hátsó emf nagysága mindig alacsony az alkalmazott feszültséghez képest. A kettő közötti különbség majdnem egyenértékű, ha az egyenáramú motor a szokásos körülmények között működik. Az áram a fő tápellátás miatt indukálódik az egyenáramú motoron. A fő táp, a hátsó elektromágneses áram és az armatúraáram viszonya Eb = V - IaRa-val fejezhető ki.
Alkalmazás az egyenáramú motor vezérléséhez 4 negyedben
Az egyenáramú motor működését 4 kvadránsban lehet vezérelni egy 7 kapcsolóval összekapcsolt mikrokontrollerrel.

4 Négyzetes vezérlés
1. eset: Az indító és az óramutató járásával megegyező irányú kapcsoló megnyomásakor a mikrovezérlő logikája logikai kimenetet ad a 7-es és a magas 2-es pólusra, így a motor az óramutató járásával megegyező irányban forog és 1utcanegyedkör. A motor fordulatszáma a PWM kapcsoló megnyomásával változtatható, és változó időtartamú impulzusokat eredményez a meghajtó IC engedélyező tüskéjén, ezzel megváltoztatva az alkalmazott feszültséget.
2. eset: Amikor az elülső féket megnyomják, a mikrovezérlő logikája alacsony logikát alkalmaz a 7-es érintkezőre, logikája pedig magas a 2-es érintkezőre, és a motor hajlamos a fordított irányban működni, aminek következtében azonnal leáll.
Hasonló módon az óramutató járásával ellentétes kapcsoló megnyomásával a motor fordított irányba mozog, vagyis a 3-ban működikrdkvadráns, és a hátramenet fékkapcsolójának megnyomásával a motor azonnal leáll.
Így a mikrovezérlő megfelelő programozásával és kapcsolókkal a motor működése mindkét irányban szabályozható.
Így itt csak az egyenáramú motor áttekintéséről van szó. A egyenáramú motor előnyei Kiváló sebességszabályozást biztosítanak a gyorsuláshoz és lassításhoz, könnyen érthető kivitelben és egyszerű, olcsó hajtás kialakításban. Itt van egy kérdés az Ön számára, milyen hátrányai vannak az egyenáramú motornak?
Fotók:
- Kefe nélküli egyenáramú motorok működnek hírek.softpedia
- 4 Az egyenáramú motor négyzetes működése lh5.ggpht
- Fogaskerekes egyenáramú motor által wikimedia
- Shunt Motor által zóna





{kind=link}
{kind=link}
{kind=link}
{kind=link}