Noha a quadcopter távirányító áramkörei nagyon egyszerűen beszerezhetők a piacról vagy bármely online áruházból, egy lelkes elektronikus hobbistának soha nem szabad megtanulnia, hogyan működnek ezek valójában, és hogy ezeket otthon meg lehet-e építeni?
Ebben a cikkben megpróbálunk egy egyszerű quadcopter távirányító áramkör diszkrét alkatrészek és RF távvezérlő modulok használata és az összetett MCU alapú áramkörök bevonása nélkül.
A lépésről lépésre bemutatott útmutató valóban megérteti az érdeklődő hobbistákat, hogyan lehet egyszerűen vezérelni egy kvadrokoptert egy PWM koncepcióval.
Már megtanultuk a quadcopter alapjai , most vizsgáljunk meg egy távirányító részt, amely végső soron elősegíti az egység távoli repülését.
Alapmodulok szükségesek
A fő összetevők, amelyekre a projektben szükség lehet, az alábbiak szerint találhatók:
Alapvetően a következő 3 áramköri szakaszra lesz szükségünk:
1) 4 utas RF távvezérlő Tx, Rx modulok - 1 készlet
2) IC 555 alapú PWM generátor áramkörök - 4nos
3) BLDC motorvezérlő áramkörök - 4nos
Mivel ez egy házi készítésű változat, számíthatunk bizonyos hatástalanságokra a javasolt kialakításban, például a vezérlő joystickjainak hiányában, amelyeket cserépbe vagy potenciométerbe cserélnek, ennek ellenére várható, hogy a rendszer működőképessége megegyezik a szakmai egységek.
A kézi PWM adóegység alapvetően 4 különálló PWM vezérlő áramkörrel integrált Tx távvezérlő modulból áll, míg a kvadrokoptert 1 Rx áramkörrel kell ellátni, amelybe 4 különálló BLDC meghajtó áramkör tartozik.
Kezdjük a quadcopter motor áramköreivel, és nézzük meg, hogyan kell konfigurálni és csatlakoztatni a BLDC motorvezérlőt az Rx áramkörhöz.
Quadcopter PWM vevő áramkör
Az előző bejegyzések egyikében megtudtuk, hogyan lehet egy sokoldalú BLDC motorvezérlőt egyetlen chip segítségével felépíteni, azonban ezt a kialakítást nem úgy tervezték, hogy egy quadcopter viszonylag nehezebb motorjait működtesse, ezért lehet, hogy nem alkalmas a jelen alkalmazásra.
A fenti áramkörhöz szerencsére rendelkezésre áll egy 'nagy testvér' opció, amely tökéletesen alkalmassá válik quadkopteres motorok vezetésére. Köszönet a TEXAS INSTRUMENTS-nek, hogy ilyen csodálatos, egy chipes alkalmazás által meghatározott áramköri modulokat biztosított számunkra.
Ha többet szeretne megtudni erről a nagy áramú BLDC illesztőprogram IC-ről, olvassa el a következő pdf adatlapot
https://homemade-circuits.com/wp-content/uploads/2015/10/slwu083a.pdf
Az alábbiakban bemutatjuk a quadcopter motorvezérlőjének teljes kapcsolási rajzát a DRV11873 IC használatával, amely egy önálló alacsony áramú BLDC motor áramkör, amely az összes szükséges védelmi funkcióból áll, mint például a túlterhelés elleni védelem, a hővédelem stb. Ez a modul alapvetően alkotja az ESC-t jelenlegi quadcopter egységünkhöz.
További információ erről a kivitelről és a NYÁK részleteiről az alábbi eredeti dokumentumban található:
http://www.ti.com/lit/ds/symlink/drv11873.pdf

Hogyan működik
Az IC FS és FG kivezetései az IC javítását szolgálják külső vezérlő áramkörökön keresztüli hozzáadott vezérléssel, mivel a tervezés során nem használjuk ezeket a funkciókat, ezeket a tűket lehet kihasználatlanul tartani, és egy 100 K-os ellenálláson keresztül a pozitív vonalig lehet zárni.
Az IC RD tűje dönti el a motor forgásirányát. Ha ezt a csapot 100 V-os ellenálláson keresztül csatlakoztatjuk a Vcc-hez, az óramutató járásával ellentétes irányban foroghat a motoron, miközben összekapcsolva hagyja az ellenkezőjét, és lehetővé teszi a motor forogását az óramutató járásával megegyező irányba.
A # 16-os tű az a PWM bemenet, amelyet egy külső forrásból származó PWM-bemenet injektálására használnak, a PWM munkaciklusának megváltoztatása ennek megfelelően megváltoztatja a motor fordulatszámát.
Az FR, CS csatlakozók szintén nem relevánsak a szükségletek szempontjából, ezért felhasználhatatlanok maradhatnak, ahogy az ábra mutatja, és 100K ellenálláson keresztül a pozitív vonalig végződhetnek.
Az U, V, W érintkezők a motor kimenetei, amelyeket össze kell kötni a megfelelő quadcopter BLDC 3 fázisú motorral.
A COM csatlakozó a háromfázisú motor közös vezetékének csatlakoztatására szolgál, ha a motorjának nincs közös vezetéke, egyszerűen szimulálhatja azt, ha 3 nos 2k2-es ellenállást csatlakoztat az U, W, W csapokhoz, majd csatlakozik a közös az IC COM tűjével végződik.
A sematikus ábrán a PWM Astable Circuit módban konfigurált IC 555 is látható. Ez az áramköri modul részévé válik, és a # 7-es érintkező PWM kimenete látható a DRV IC áramkör PWM bemenetéhez csatlakoztatva annak érdekében, hogy a 4 motort állandó alapsebességgel indítsák be, és hogy a motor állandóan lebegjen sebesség egy adott helyen.
Ezzel lezárul a fő ELC áramkör vagy a BLDC meghajtó áramkör a quadcopter tervezéséhez.
Négy ilyen modulra lesz szükségünk a négy motorhoz a quadcopter tervezésénél.
Ez azt jelenti, hogy 4 ilyen DRV IC-t és az IC 555 PWM fokozatot össze kell kapcsolni a quadcopter mind a 4 motorjával.
Ezek a modulok biztosítják, hogy általában mind a 4 motor előre meghatározott fordulatszámra legyen beállítva, rögzített és azonos PWM jel alkalmazásával az egyes vonatkozó DRV vezérlő IC-ken.
Most tanuljuk meg, hogyan lehet a PWM-et egy távirányítóval megváltoztatni az egyes motorok sebességének megváltoztatása érdekében egy hétköznapi 4 csatornás távvezérlő kézibeszélő segítségével.
Az RF vevő modul (PWM dekóder)

A fenti áramkör mutatja a vevő távoli RF áramkörét, amelyet állítólag a quadcopterben kell elhelyezni, hogy külső vezeték nélküli PWM adatokat fogadjon a felhasználó távoli adóegységéből, majd a jeleket megfelelően feldolgozza a kísérő DRV vezérlő modulok táplálása érdekében, amint azt a előző szakasz.
A PWM # 1… .PWM # 4 kimenetet össze kell kötni a DRV IC # 15 PWM tűjével, az előző ábra szerint.
Ezek a PWM kivezetések az RF vevőegységről akkor aktiválódnak, amikor a felhasználó az adóegységében megnyomja a megfelelő gombot.
Hogyan kell az RF adót bekötni (PWM kódoló)
A fenti szakaszban megvitattuk az Rx vagy a távoli vevő áramkört, és azt, hogy annak 4 kimenetét hogyan kell összekapcsolni a quadcopter motor ESC meghajtó moduljaival.
Itt láthatjuk, hogyan kell létrehozni és összekötni az egyszerű RF jeladót PWM áramkörökkel a PWM adatok vezeték nélküli továbbításához a quadcopter vevőegységhez úgy, hogy az egyes motorok fordulatszámát egyszerűen egyetlen gombnyomással vezéreljék, ami végső soron a quadcopter irányának vagy sebességének megváltoztatásához, a felhasználói preferenciák szerint.

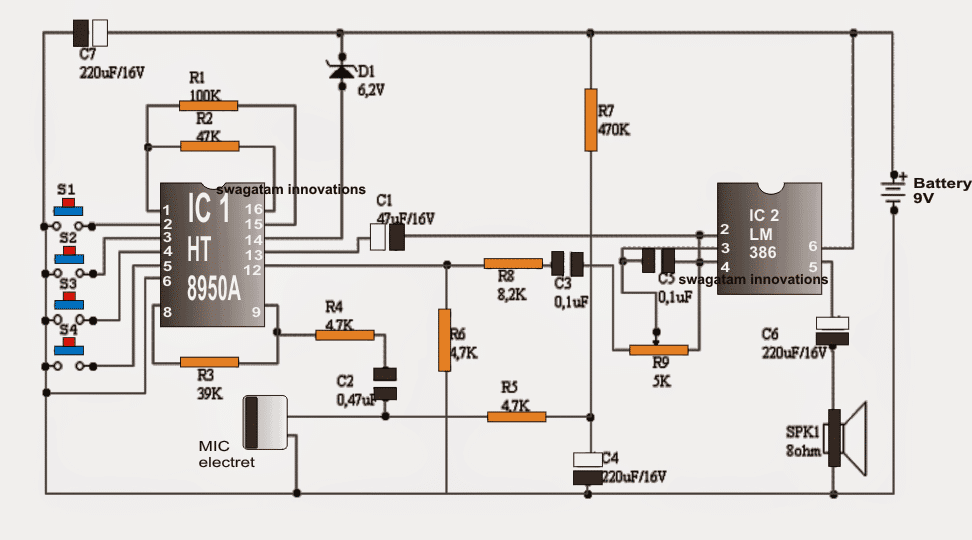
A fent bemutatott áramkör bemutatja az adómodul vezetékének részleteit. Az ötlet elég egyszerűnek tűnik, a fő adó áramkört a TSW434 chip alkotja, amely a kódolt PWM jeleket továbbítja a légkörbe, és a HT12E, amely felelőssé válik a kódolt jelek TSW chipbe juttatásáért.
A PWM jeleket 4 különálló IC 555 áramkör állítja elő, amelyek azonosak lehetnek a DRV vezérlő modulban korábban tárgyaltakkal.
A 4 IC PWM-tartalma látható az IC HT12E kódoló megfelelő pinoutjain keresztül, négy különálló nyomógombon keresztül, SW1 ---- SW4 jelzéssel.
E gombok mindegyike megegyezik a befogadó modul azonos kivezetésével, amelyet korábban megbeszéltünk és PWM # 1, PWM # 2 ... ..PWM # 4.
Az SW1 megnyomása azt eredményezheti, hogy a vevőegység PWM # 1 kimenete aktív lesz, és ez megkezdi a vevő által dekódolt PWM jelek betáplálását az adóból a kapcsolódó DRV modulba, és ezáltal a megfelelő motor sebességének megfelelő módosítását.
Hasonlóképpen az SW2,3,4 megnyomásával befolyásolhatja a többi 3 quadcopter motor sebességét, ahogy a felhasználó kívánja.
IC 555 PWM áramkör
A fenti RF adó kézibeszélőn látható 4 PWM áramkör a következő diagramra hivatkozva építhető fel, amely pontosan hasonlít a DRV vezérlő ESC áramkörünkhöz.

Ne feledje, hogy az 5K edény lehet egy szokásos edény formája, és ezt a potot a gombokkal is ki lehet használni a különböző motorok sebességének kiválasztásához.
A kiválasztott gomb nyomva tartásával és a megfelelő 5KPWMpot egyidejű mozgatásával a quadcopter növelheti vagy csökkentheti sebességét a kívánt irányba.
Alternatív megoldásként a PWM kezdetben valamilyen magasabb vagy alacsonyabb szintre állítható, majd a megfelelő gombot megnyomva lehetõvé válik, hogy a megfelelõ kvadrokmotor elérje az elõnyös sebességet, a PWM beállítás szerint.
Quadcopter motor specifikáció
A fent ismertetett Qiadcopter távvezérlő áramkört csak a kijelző céljára használják, és nem használható teher vagy kamera emelésére. Ez azt jelenti, hogy a tervezés során használt motoroknak lehetőleg alacsony áramúaknak kell lenniük.
A DRV11873 IC-t 15 V-os, 1,5 amperes vagy 20 wattos motorok motorjának opetálására tervezték ... így bármely 15-30 wattos névleges 3 fázisú BLDC motor használható erre a célra.
Az akkumulátor ehhez a quadcopter kialakításhoz bármely 12 V-os Lipo pr Li-ion akkumulátor lehet, amely képes 15 V csúcsot 1,5 amperes folyamatos árammal ellátni.
A specifikáció részletei
1306N kefe nélküli kimeneti miniatűr egyenáramú motor
Típus: Mikromotor
Felépítés: Állandó mágnes
Kommutáció: Kefe nélküli
Fordulatszám (RPM): 2200 rpm / v
Folyamatos áram (A): 1,5 ~ 2,6A
Feszültség (V): 7,4 ~ 11,1 V
miniatűr egyenáramú motor: AX-1306N
súly: 8g
tengely átmérője: 1,5 mm
LI-PO akkumulátor: 2-3 másodperc
üzemi áram: 1,5 ~ 2,6A
max hatékonyság: 67%

Előző: Szenzor nélküli BLDC motorvezérlő áramkör Következő: A fűtésvezérlő áramköre nyomógombokkal