
Általában a távvezérlő robotok RF áramköröket használnak, amelyek hátrányai korlátozott működési tartomány, korlátozott vezérlés és korlátozott frekvenciatartomány. E hátrányok leküzdése érdekében mobiltelefon működtetett land rover robot járművet használnak. A robotvezérlés, a behatolásmentes vezérlők és akár tizenkét vezérlőrendszer stb. Előnyeit nyújtja.
Bár képességei és megjelenése beágyazott robotika nagymértékben különböznek, az összes robot valamilyen irányítás alatt osztozik egy mozgatható, mechanikus szerkezet jellemzőin. A robotok irányítása három különböző fázist foglal magában, ezek az észlelés, a feldolgozás és a cselekvés. Normális esetben az érzékelők a robotra vannak felszerelve. Az érzékelést és a feldolgozást a fedélzeti mikrovezérlő végzi, és a műveletet motorok segítségével hajtják végre.
Mobiltelefonos Land Rover robot jármű

Mobiltelefonos Land Rover robot jármű, az Edgefxkits.com
Ennek a projektnek a fő célja egy robotkar vezérlése, amely egy mobiltelefonra van felszerelve egy mobiltelefon segítségével. Nagy munkatartományt és robusztus vezérlést biztosít.
Blokkdiagram a mobiltelefonos Land Rover robot járműről:

Blokkdiagram a mobiltelefonos Land Rover-ről
A fő építőelemek a mikrovezérlő, a mobiltelefon, a DTMF dekóder és a DC-motor-meghajtó áramkör. A mobiltelefon az egész rendszer legfontosabb része, mert az egész rendszer működik, és a mobiltelefon aktiválja. DTMF (kéttónusú, többfrekvenciás) megkapja a bemeneti jelet a mobiltelefonról és dekódolja, majd 4 bites digitális kimenetet generál 8051 mikrovezérlő . Amikor a DTMF dekóder digitális kimenetet ad, akkor minden alkalommal megszakítást generál.
A mikrovezérlő az egész rendszer szíve, mivel a teljes vezérlő műveletet végrehajtja. A mikrovezérlő attól a kódtól függ, amelyet a DTMF dekóder generál, hogy a rovert mindkét DC motor forgatásával jobbra vagy balra, előre vagy hátra mozgassa. Az egyenáramú motor meghajtója alacsony vagy magas logikai szempontból aktiváló jeleket kap a mikrovezérlőtől, majd két motort erősít és forgat mindkét irányban.
A robot irányítása főként négy különböző fázist foglal magában: észlelés, műveletfeldolgozás és észlelés. Az észlelési szakaszban, ha a robothoz csatlakoztatott mobiltelefon hívást fogad, akkor a gomb megnyomása a mobiltelefonon dekódolja a létrehozott DTMF hangot. Ezután a dekóder chip megkapja az audiojelet a mobiltelefonról, majd a DTMF hangot bináris kódgá alakítja, amelyet aztán a mikrovezérlőbe táplálnak. Ebben a projektben egy MT88710 IC-t használnak DTMF dekóderként. A feldolgozási szakaszban a mikrovezérlő feldolgozza a DTMF dekódertől kapott bináris kódot. A A mikrokontrollert előre beprogramozták „C” -be hogy ezt a bizonyos feladatot a bemeneti bitek szerint hajtsa végre.
Az akció szakaszában a motorok forgása a mikrovezérlő által adott bemenettől függ. Két egyenáramú motor, mindegyik 30 ford / perc, a landroverhez használatos, és a motorvezérlő IC hajtja őket. A színpad észlelésénél és az akadályok észlelésénél egy infravörös adó és vevő a hangjelzővel együtt használják. Amikor az akadály a robot elé kerül, az IR adó továbbítja az IR sugarakat az objektumon, majd az objektum visszaveri az IR sugarakat az IR vevő felé. Az infravörös vevő ezután fogadja az infravörös sugarakat a hangjelzés aktiválásához.
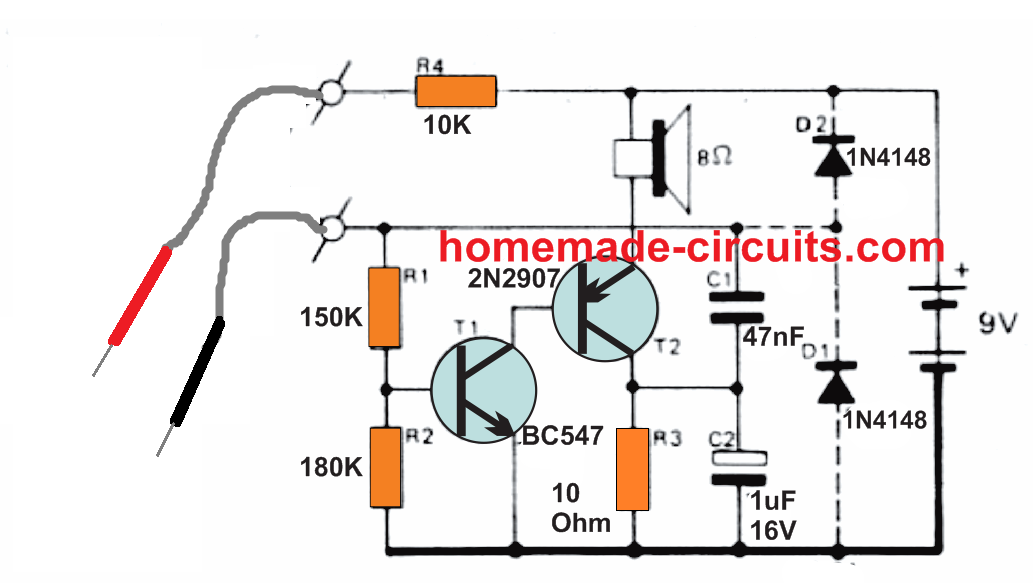
A mobiltelefonon üzemelő land rover robot jármű áramköri rajza:
A mobiltelefonnal működtetett robot Landrover fő alkotóelemei a mikrovezérlő, a motorvezérlő és a DTMF dekóder. Ebben a projektben egy MT8870 sorozatú DTMF dekódert használnak, amely digitális számlálási technikákat alkalmaz a 16 DTMF hangpár 4 bites kódkimenetre történő detektálására. A beépített dialtone áramkör kiküszöböli az előszűrést. Ha bemeneti jelet kap a pin2-nél, akkor a bemeneti konfigurációt hatékonynak ismerik fel. A DTMF hang 4 bites dekódolási jele a 14 érintkező kimenetén keresztül kerül át a pin11-re. Ezek a csapok a Pao, Pa1, Pa2 és Pa3 mikrokontroller csapokhoz vannak kötve. A mikrovezérlő kimenete a PD0 – PD3 és PD7 csatlakozótüskékből az IN1, IN4 bemenetekhez kerül, és lehetővé teszi az L293D IC motorvezérlő EN1, EN2 érintkezőinek vezesse a két egyenáramú motort .

A mobiltelefonos Land Rover áramköri rajza
Ebben az áramkörben az S1 kapcsolót használják kézi visszaállításra. A mikrovezérlő kimenete nem elegendő az egyenáramú motorok meghajtásához, ezért a motor forgatásához szükségesek az aktuális meghajtók. Az L293D motorvezérlőt úgy tervezték, hogy akár 600 mA kétirányú hajtóáramot is biztosítson 4,5 V és 36 V feszültség között, ami miatt könnyebb vezetni az egyenáramú motorokat. Az L293D motorvezérlő négy meghajtóból áll. Az IN1 - IN4, OUT1 és OUT4 csapok az 1 - 4 meghajtó meghajtójának bemeneti és kimeneti csapjai. Az 1, 2, 3 és 4 meghajtókat az engedélyező tű 1 (EN1) és a 9 tű (EN2) engedélyezi. Ha az EN1 engedélyezési bemenet (pin1) magas, akkor az 1. és 2. illesztőprogram engedélyezett. Hasonlóképpen, az EN2 engedélyező bemenet (pin9) lehetővé teszi a meghajtók 3 használatát.
Előnyök és hátrányok:
A mobiltelefon által működtetett robot Landrover előnyei közé tartozik a vezeték nélküli vezérlő kiépítési és felügyeleti rendszer, a 3G technológián alapuló jármű navigáció és a mobiltelefon hálózatán alapuló korlátlan működési tartomány. Hátránya: a mobiltelefon-számlázás költsége magas a mobil akkumulátorok lemerülnek : az akkumulátorokkal kapcsolatos lemerülési probléma, mivel az akkumulátorok lemerülnek a gyors lemerülés miatt, mert a terhelés nagy alkalmazkodóképességű: a rendszer nem alkalmazható minden mobiltelefonhoz, de a fülhallgatóval felszereltek csak használhatók.
Így ez a Cellphone által működtetett robotprojekt nagyon hasznos katonai alkalmazásokban a katonai járművek mobiltelefon segítségével történő irányításához. A jövőben felismerhetjük az ellenségek helyzetét a vezeték nélküli kamera a land rover robotjárműhöz. Ez a projekt az akadémikusok számára is hasznos lehet, mivel a hallgatók megismerhetik a projektben javasolt különféle terminológiákat és elveket. Ez a projekt segít a diákoknak, hogy hozzáadják innovatív gondolataikat és ötleteiket robotikai projektek kidolgozása .
Fotók:
- Mobiltelefon által működtetett Land Rover santoshbanisetty
- A mobiltelefon által működtetett Land Rover áramköri rajza mérnökgarázs










{kind=link}