A különösen a robotikai technológiák fejlődésével a robotok túlnyomórészt számos alkalmazásban megtalálhatók. Ezek egy része nagyon kockázatos típusú és veszélyes terület. A katonai és a harctéri alkalmazások egyre növekvő mértékben használják robotjaikat néhány döntő és bonyolult feladatban. Egyik cikkemben leírtam a robotok kémként való alkalmazását a hadműveletekben. Most mi van, ha szükség van a védekezésre a robot jármű vagy a robot támadása? Itt merül fel a támadási mechanizmusba ágyazott robot iránti igény. Ilyen például a robotgép, LASER fegyverrel.

RF vezérlésű robotgépjármű lézersugaras elrendezéssel
Egy ilyen robotot alapvetően katonai műveletekben és a közlekedési rendőrök is használnak a mozgó járművek sebességének felderítésére.
Mielőtt a lézerfegyverekkel foglalkozó robotokkal foglalkoznánk, ismerjük meg gyorsan a LASER-t mint fegyvert.
A LASER (Light Amplification by Stimulation Emission) nyaláb egyirányú erősen fókuszált fény, ellentétben az egyszerű izzóval. Szinkronizált vályúkból és címerekből áll, vagyis a hullámok nem zavarják egymást. Ez erősen fókuszált, nagyon nagy teljesítményű, 1000-1 milliószor nagyobb fényt eredményez, mint egy tipikus izzólámpa. Ez egy olyan eszköz, amely megfelelő mennyiségű energia pumpálásával szabályozza a fotonok kibocsátását és abszorpcióját. Ebben a fotonok forrása fénysugárrá erősödik. Ezeknek a lézereknek a hullámhossza különböző spektrumokra változik, például látható, infravörös és ultraibolya.
A LASER mögött álló elv három dolog körül forog, ezek az abszorpció, a spontán emisszió és a stimulált emisszió. A foton megfelelő mennyiségű energiája kölcsönhatásba lép az atomral, aminek következtében az atom alacsonyabb energia állapotból magasabb energia állapotba ugrik. Ez az atom egy alacsonyabb energiájú állapotba esik, egy spontán emissziónak nevezett foton kibocsátásával. A stimulált emisszióban az atom mesterséges úton történő felszabadulása. tehát a foton kölcsönhatásba lép a gerjesztett atomral, energiája és polarizációja megegyezik a beeső fotonnal.
Most nézzük meg a robot hardver alkatrészeit
- Bázis: Az ilyen robot alapja lehet bármilyen köbös test, amelynek mozgása érdekében kerekek vannak rögzítve.
- DC motor: A robot két egyenáramú motorból áll, amelyeket a motorvezetők hajtanak, és biztosítja a szükséges mozgást a robot számára.
- Vezérlőegység: A robot mozgását egy RF kommunikációs modul segítségével vezérlik. Az adó nyomógombokból, mikrovezérlőkből, dekóderből és RF adóból áll, míg a robotba ágyazott vevőegység egy kódolóból és RF vevő modulból áll a robotmozgás .
- Lézeres fegyver: A robotra egy LASER fegyver van felszerelve, amely a robot fő feladatát látja el.
Bepillantás a működő robotba
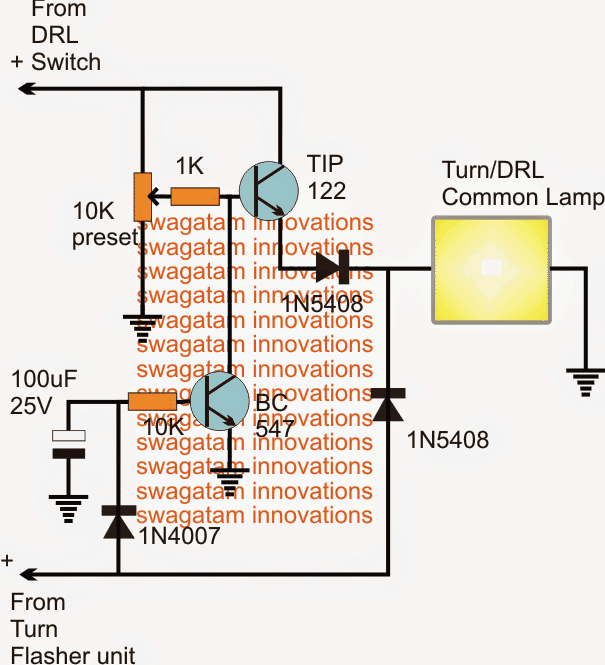
A robot a kívánt irányban haladva egy erős fénysugarat lő ki a LASER pisztolyból, amely vagy károsíthatja a célt, vagy csak pontot generál a cél észlelésére. A LASER-t bizonyos energiaforrásoknak kell vezérelniük. Az egyszerű LASER tollat használó egyszerű prototípus-tervezésnél a készüléket egy tranzisztor hajtja, amely kapcsolóként működik. A tranzisztor az alacsony logikai jelet fogadja a mikrovezérlőtől, és kikapcsolt állapotban van, így a LASER modul közvetlenül az 5 V-os tápegységhez csatlakozik.

Inverterként működő tranzisztor által hajtott lézerfegyver
A robot irányítása
A robot mozgásának irányításához ellenőrizni kell a motorok működését. Ez a motorvezérlők rádiófrekvenciás vezérléssel történhet. A parancsokat egy rádiófrekvenciás adó segítségével továbbítják valamilyen, körülbelül 200 méteres távolságegységen, és az RF vevő fogadja őket a motorok meghajtására.
Az adóegység több nyomógombból áll, amelyek parancskapcsolóként működnek a robot bármilyen kívánt irányba történő mozgatásához. A nyomógombok kapcsolódnak a mikrovezérlőhöz, amely úgy van programozva, hogy az adatokat a nyomógomb bemenet alapján párhuzamos formában küldje el a kódolónak. A kódoló ezeket a párhuzamos adatokat soros formává alakítja, és ezeket a soros adatokat az RF adó modul segítségével továbbítják egy antennán keresztül.

Blokkdiagram, amely az adóegységet mutatja
A vevőegység egy RF vevő modulból áll, amely fogadja a modulált jelet és demodulálja azt. A dekóder soros formában fogadja a demodulált jelet, és átalakítja azt párhuzamos formává. A mikrovezérlő fogadja a jeleket, és ennek megfelelően vezérli a motorvezérlőt. Az LM293D-ben használt motorvezérlő, amely egyszerre 2 motort képes vezérelni.

Blokkdiagram a vevő szakaszát mutatja
Így az RF kommunikáció segítségével irányíthatjuk a robotot.
A fenti leírásokban röviden áttekintettem egy LASER sugárral ellátott robot jármű egyszerű prototípusát. A való életben általában nagy hatótávolságú kommunikációs rendszereket használnak, mint a GSM vagy a DTMF, hogy távoli helyekről irányítsák a robotot.
3 lézerfegyverrel ellátott robotgépjármű alkalmazása:
- Célfelismerés : A robot jármű a LASER sugár segítségével foltot okozhat a célponton oly módon, hogy könnyen látható legyen és megcélozható legyen. Ilyen például az Air Borne LASER.
- Célpusztítás : Egy erős Lézersugár nagyságrendű, 95 GHz-es frekvencia égési érzést okozhat az emberi testben, mivel 1/64-ig behatol a bőrbethegy hüvelyk és a nyaláb energia felmelegítheti a testben lévő vízmolekulákat. Ilyen például az USA által kifejlesztett Active Denial System.
- Céltartomány kereső és sebességérzékelés : A robot járműből származó LASER fénysugár felhasználható a LASER fényvisszaverődés elvével a cél hatótávolságának megtalálásához, és a cél sebessége is kiszámítható, ha megkapjuk a hatótávolságot.
Tehát most van egy rövid ötletünk arról, hogy a robotok céldetektort és rombolót használtak. Van-e haszna a normál lakosság számára, nem csak a katonaság? Gondolkodj és válaszolj.