
Napjainkban a robotika az egyik legfejlettebbé válik a technológia területén. A robotika alkalmazásai főleg az autóiparban, az orvosi, az építőiparban, a védelemben vesz részt, és a tűzoltó robot hogy segítsen az embereknek a tűzbalesetben. De a robot távirányítóval vagy kapcsolóval történő irányítása meglehetősen bonyolult. Tehát egy új projektet fejlesztenek ki, vagyis egy gyorsulásmérő alapú gesztusvezérlő robotot. A projekt fő célja a robot mozgásának kézmozdulattal történő szabályozása gyorsulásmérővel.

Gyorsulásmérő alapú gesztusvezérlő robot
Gyorsulásmérő alapú gesztusvezérlő robot
Ez a projekt magában foglalja az adó és a vevő részt. A szükséges alkatrészeket A projekt építéséhez a Ht12e, Ht12d, L293D, AT89S52, 7805, kondenzátor, kristály, PBT csatlakozó, egypólusú antenna, ellenállás, LED, gyorsulásmérő és akkumulátor tartozik. A gyorsulásmérő elengedhetetlen eszköz ebben a projektben.
gyorsulásmérő vagy adó készülék a kézmozdulattól függ. Az adóegységen keresztül kap egy parancsot, amelyet az At89S51 mikrovezérlő segítségével dolgoznak fel. Ez mikrokontroller ad jelezzék a robotnak, hogy haladjon az előnyös irányba. Ennek a robotnak az alapvető működési elve az adatjelek továbbításával az eszköz leolvasása a robotba illesztett mikrovezérlő felé. Az előre beprogramozott mikrovezérlő a program szerint működik, ami a robotot ennek megfelelően működik.
A gyorsulásmérő segítségével egy gesztusvezérelt robot egyfajta robot, amelyet kézmozgatással lehet működtetni, egy gyorsulásmérőt ráhelyezve. Ez a projekt két részre oszlik: adó és vevő készülék. Ha egy gesztus eszköz adóeszközként működik, és egy robot vevő eszközként működik. Amikor egy adó eszközt (gyorsulásmérőt) helyeznek a kézre, akkor jeleket küld a robotnak a szükséges művelethez.
A továbbító szakaszban használt fő komponensek közé tartozik egy gyorsulásmérő, komparátor, HT12E IC kódoló és RF adó .
Gyorsulásmérő
A gyorsulásmérő egy érzékelő típusa és analóg adatokat ad, miközben X, Y és Z irányba mozog. Ezek az irányok az érzékelő típusától függenek. A gyorsulásmérő diagramja az alábbiakban látható. Ez az érzékelő nyílirányokból áll, ha az érzékelőt egy irányba billentjük, akkor az adott csapnál lévő adatok analóg formában változnak. A gyorsulásmérő hat csapból áll, ahol az egyes csapok funkciója az alábbiakban tárgyaljuk.

Gyorsulásmérő
- 1. tű: A VDD tűvel + 5 V tápot adnak ennek a tűnek
- Pin-2: A GND csap a földhöz van csatlakoztatva előfeszítés céljából
- Pin-3: X pin fogja az adatokat X irányban
- Pin-4: Az Y pin Y irányban fogadja az adatokat
- Pin-5: A Z pin az adatokat Z irányba fogja fogadni
- Pin-6: Az ST csapot a gyorsulásmérő 1,5 g vagy 2 g vagy 3 g vagy 4 g érzékenységének beállítására használják
Összehasonlító
Az összehasonlítót arra használják, hogy az analóg feszültséget digitális feszültségre változtassa, és összehasonlítja az analóg feszültséget egy referenciafeszültséggel, és pontos alacsony vagy magas feszültséget ad
Encoder
Ezt a kódolót a 4 bites adatok kódolására használják, és RF adó modul segítségével továbbítják.
RF adó modul
Az RF TX modul 433MHz frekvenciával működik, és ez a modul alacsony költség mellett könnyen elérhető a piacon
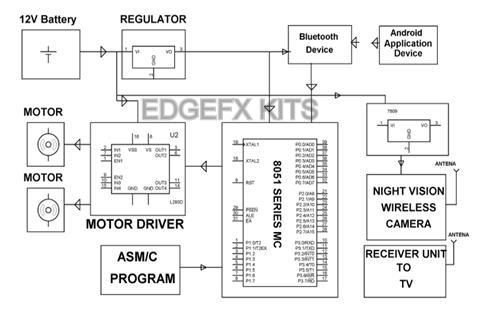
A vevő szakaszban használt fő komponensek közé tartozik a vevő, a dekóder, a mikrovezérlő és a motor meghajtó.

Adó szakasz
RF vevő
Ennek a projektnek a rádiófrekvenciás vevője fogadja az adatokat, amelyeket az adóeszköz továbbít.
Dekóder
A dekódert arra használják, hogy a soros adatokat párhuzamos adatokká változtassák, amelyeket az RF vevő modul fogad.
Mikrovezérlő
A a mikrovezérlő a legfontosabb elem a robot. Az áramkörben egy 8051-es mikrovezérlőt használnak a döntési képesség megadására
Motorvezető
A motorvezérlő olyan eszköz, amely mozgást ad a feladat elvégzéséhez, mint egy motor. Tehát megköveteljük, hogy a motorvezérlő futtassa őket a vezérlőn keresztül. A motor és a mikrovezérlő közötti interfész ebben az áramkörben egy L293D motorvezérlő IC segítségével valósítható meg.
A vevő résznél egy RF vevő modul fogadja az adókat az adótól. A vett adatokat dekódolhatja egy IC HT12D. A beérkezett adatokat az AT89S51 mikrovezérlő tudja feldolgozni, és a motor vezérlésével a motor vezérelhető.

Vevő szakasz
Gesztusvezérlő robot működik
A gyorsulásmérő alapú gesztusvezérelt robot a kéz mozgásának megfelelően mozog, miközben a gyorsulásmérőt a kezére helyezzük. Amikor a kezét egy gyorsulásmérővel a robot elé döntjük, akkor a robot elindul előre, amíg a következő mozdulatot meg nem adják. Amikor a kezünket hátrafelé billentjük, akkor a robot megváltoztatja irányát és állapotát. Ezután elkezd hátrafelé mozogni, amíg meg nem érkezik a következő jel. Amikor a bal oldalra billentünk, akkor a robot bal oldalra mozog, amíg a következő jel nem érkezik. Ugyanígy, amikor a kezünket jobb oldalra billentjük, akkor a robot a jobb oldalát mozgatja.
Alkalmazások
A a gyorsulásmérő alkalmazásai alapú gesztusvezérelt robot közé
- Ezeket a robotokat katonai alkalmazásokban használják robotok működtetésére
- Ezeket a robotokat orvosi alkalmazásokban használják műtét céljából
- Ezeket a robotikákat az építkezés területén használják
- Ezeket a robotikákat az iparban használják a trolik és az emelés vezérlésére.
Így itt minden az Accelerometer alapú gesztusvezérlő robotról, annak működéséről és alkalmazásáról szól. Reméljük, hogy jobban megértette ezt a koncepciót. Ezenfelül bármilyen kétség merül fel e koncepcióval kapcsolatban, ill elektronikai projektek , kérjük, adja meg visszajelzését az alábbi megjegyzés részben kommentálva. Itt van egy kérdés az Ön számára, mik a gyorsulásmérő alapú gesztusvezérlő robot alkalmazásai?
Fotók:
- Gyorsulásmérő alapú gesztusvezérlő robot ytimg
- Gyorsulásmérő static.flickr




{kind=link}
{kind=link}