Ebben a bejegyzésben megvizsgáljuk az IC L293 műszaki jellemzőit és kitöltési részleteit, amely egy sokoldalú quad half-H meghajtó IC, és sok érdekes motor megvalósítására használható. meghajtó alapú áramkör alkalmazások, például motorok, mágnesszelepek és más induktív terhelések működtetésére (4 egység külön-külön vagy párban a push-pull módban).
Hogyan működik
Az IC L293 alapvetően két kimeneti párral rendelkezik, amelyek egymástól függetlenül használhatók két különféle terhelés működtetésére push pull módban vagy kétirányú módon, más néven totem pólus módnak. Alternatív megoldásként ez a pár kimeneti pár külön-külön is alkalmazható. 4 egyedi terhelés egyirányú működtetésére szolgál.
A terhelések fenti műveleteit megfelelő bemeneti nyílásokon keresztül lehet vezérelni, amelyeket egy külső oszcillátor áramkör vagy a PWM forrás .
Például, ha a terhelést totem pólusú módon kell működtetni, az IC két vezető fokozatának megfelelő bemeneteit egy külső oszcillátor, például néhány NAND kapun keresztül ahol az egyik kapu oszcillátorként, míg a másik inverterként huzalozható.
A két antifázis jel ezekből NAND kapuk akkor összekapcsolható az L293 bemeneteivel a vonatkozó kimenetek totem pólusú (push-pull) módon történő működtetése érdekében, ami viszont ugyanúgy működteti a csatlakoztatott terhelést.
Az IC L293 csatlakozóinak hozzárendelése
Most tanuljuk meg az IC L293 rögzítési funkcióit az alábbi ábra és az alábbi magyarázat alapján:

A # 2 tű a vezérlő bemenet, amely a # 3 kimeneti tűt vezérli.
Hasonlóképpen, a # 7-es érintkező a # 6-os kimeneti vezérlő bemenet.
Az 1. tű a fenti tűsorozatok engedélyezésére vagy letiltására szolgál. Az 1. tűnél lévő pozitív érték engedélyezi és aktívvá teszi a fenti csatlakozókészleteket, míg a negatív vagy 0 V tápegység azonnal letiltja őket.
A 15-ös és a 10-es érintkezõ a megfelelõ 14-es és 11-es kimenet vezérlõ bemenetévé válik, és ezek csak addig maradnak mûködõképesek, amíg a # 9 érintkezõt pozitív logikán tartják, és letiltják, amikor 0 V logika erre a pinoutra alkalmazva.
Amint azt korábban kifejtettük, a # 3 és a # 6 érintkezők totemoszlop-párként használhatók azzal, hogy anti-fázis logikai jelet táplálnak a # 7 és 2-es bemenetükre. Ez azt jelenti, hogy amikor a # 2 tűt pozitív logikával táplálják, akkor a # 7 tűnek negatív logikával kell rendelkeznie, és fordítva.
Ez lehetővé teszi, hogy a # 6 és a 3 kimeneti tű a csatlakoztatott terhelést megfelelő irányban működtesse, és fordítva, amikor a bemeneti logikai jelek megfordulnak, a terhelés polaritása is megfordul, és az ellenkező irányba kezd forogni.
Ha ezt a sorrendet gyorsan kapcsolják, akkor a terhelés ennek megfelelően működik ide-oda vagy tolóhúzással.
A fenti művelet megismételhető a másik oldalsó illesztőprogram-páron is.
A Vcc vagy az IC pozitív tápbemenetei egymástól függetlenül vannak konfigurálva két különböző tápbemenetre.
A # 16-os (Vcc1) érintkező az engedélyező tűk működtetésére és az IC egyéb belső logikai szakaszainak működtetésére szolgál, és ezt 5 V-os bemenettel lehet ellátni, bár a maximális korlátozás 36 V
A 8. számú tű (Vcc2) kifejezetten a motorok táplálására szolgál, és ezt 4,5 V-tól 36 V-ig lehet táplálni
Az IC villamos specifikációja L293
Az IC L293-at úgy tervezték, hogy bármilyen 4,5 V és 36 V közötti tápfeszültség mellett működjön, maximális áramkezelési specifikációja legfeljebb 1 amper (2 Amper impulzus üzemmódban, max 5ms)
Ezért a fent említett előírásokon belül bármilyen terhelés működtethető az IC L293 tárgyalt kimenetein.
A bemeneti vezérlés logikáját nem szabad túllépni 7 V felett, akár folyamatos táplálásként, akár PWM-ellátásként.
Az L293 IC használata a motorvezérléshez
Tanuljuk meg, hogyan lehet a motorvezérlő áramköröket az IC L293 segítségével különféle működési módokon keresztül megvalósítani, és akár 4 motort külön vezérlési lehetőséggel.
Korábbi bejegyzésünkben tanulmányoztuk az IC L293 csatlakozóját és működésének részleteit, itt megtudhatjuk, hogyan lehet ugyanazt az IC-t használni a motorok vezérléséhez meghatározott módok és konfigurációk révén.
Vezérlési módok
Az IC L293 az alábbi üzemmódokban használható motorok vezérlésére:
1) 4 motor független PWM bemeneteken keresztül.
2) 2 motor kétirányú vagy totemoszlopos üzemmódban, sebességszabályozással PWM-en keresztül
3) Egy kétfázisú BLDC motor PWM bemenet segítségével
Az alábbi kép megmutatja, hogyan lehet az IC-t használni független vezérlésű motorok vezérléséhez, és azt is, hogyan lehet egyetlen motort használni egy kétirányú vezérlés :

Az IC bal oldala azt mutatja, hogy egy motor kétirányú üzemmódban működik. Annak biztosítása érdekében, hogy a motor a kiválasztott irányok egyikében forogjon, az 1. és a 7. sz. Csapokat antifázisú 5 V DC bemenettel kell alkalmazni. A motor forgásirányának megváltoztatásához ez az 5 V-os polaritás megváltoztatható az említett bemeneti tűkön.
Az 1. tűt logikai magasságban kell tartani a motor és az IC működésének engedélyezése érdekében. A 0 logika itt azonnal leállítja a motort.
A táp a vezérlő bemeneti nyílásokon PWM formájában lehet, ezt fel lehet használni a motor fordulatszámának szabályozása 0-tól maximumig egyszerűen a PWM munkaciklus változtatásával.
Az IC jobb oldala egy elrendezést ábrázol, amelyben néhány motort függetlenül vezérelnek a PWM bemenetein keresztül a megfelelő # 15 és 10 tűnél.
A # 9-es csapot logikai magasan kell tartani a motor és az IC működésének megőrzése érdekében. A logikai nulla ezen a kivezetésen azonnal leállítja és letiltja a csatlakoztatott motorok működését.
Mivel az IC bal és jobb oldali szakaszai megegyeznek a kitűző működési részleteikkel, a motorok ábrázolt elrendezését fel lehet cserélni a megfelelő érintkezőkön az azonos működés elérése érdekében, a fentiek szerint, vagyis két külön motor csatlakoztatható a az IC bal oldala pontosan úgy, ahogyan azt az ábra jobb oldalán az IC.
Hasonlóképpen, a kétirányú rendszert be lehet építeni az IC csapok jobb oldalára, pontosan úgy, ahogyan azt az IC bal oldalán a fenti ábra mutatja.
A fenti példa bemutatja, hogy az IC L293 miként használható 4 motor külön-külön, vagy 2 motor kétirányú üzemmódban történő vezérléséhez, és hogyan lehet a sebességet is szabályozni egy PWM előtolással az IC megfelelő bemeneti csatlakozóin.
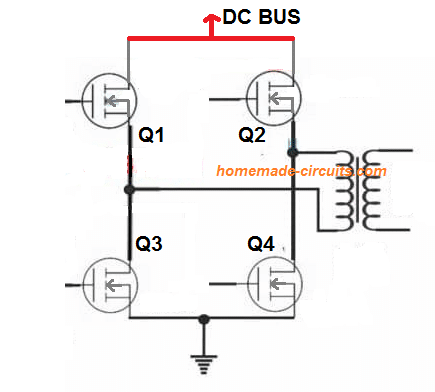
Az L293 segítségével kétfázisú BLDC motor vezérelhető

A fenti képen láthatjuk, hogyan konfigurálható az IC L293 egy kétfázisú BLDC motor vezérlésére a jelzett csatlakozók segítségével, valamint az A és B vezérlésként látható pár vezérlő bemeneten keresztül.
Egyetlen kétfázisú motor látható az IC kimenetein keresztül csatlakoztatva, míg a bemenetek egy sor NOT kapuval vannak bekötve, amelyek felelősek a motorvezérléshez szükséges antifázisú bemeneti logika létrehozásáért.
Az A és B vezérlőpontok váltakozó logikának vethetők alá, hogy a kétfázisú motor megfelelően forogjon.
A váltakozó logika polaritása dönti el a motor forgásirányát.
A motor lineáris fordulatszám-szabályozásának elérése érdekében az A és B vezérlő bemeneten keresztül megvalósítható egy PWM logikai forma, és annak működési ciklusa változtatható a kívánt sebességszabályozás eléréséhez a csatlakoztatott motoron.
Ha további kétségei merülnek fel a műszaki specifikációkkal, az adatlapdal vagy az IC kitöltési részleteivel kapcsolatban, bármikor nyugodtan megjegyezheti azonnali válaszokat.
Előző: Vezeték nélküli hőmérő 433 MHz-es RF Link használatával Arduino használatával Következő: Univerzális ESC áramkör BLDC és generátor motorokhoz