Rövid bemutatás egy robotról:
A robot minden olyan gép, amely teljesen automatikus, azaz önállóan elindul, elhatározza saját munkamódszerét és önmagában leáll. Valójában az emberi lény mása, amelyet az emberi teher megkönnyítésére terveztek. Vezérelhető pneumatikusan vagy hidraulikus módszerekkel, vagy az egyszerű elektronikus vezérlési módszerekkel. Az első ipari robot az Unimates volt, amelyet George Devol és Joe Engelberger épített az 50-es évek végén és a 60-as évek elején.
Bármelyik robot 3 alapvető törvényre épül, amelyet Isaac Asimov orosz sci-fi szerző határoz meg:
- A robotnak nem szabad közvetlen vagy közvetett módon ártania az embernek.
- A robotnak be kell tartania az emberi parancsokat, hacsak és amíg nem sérti az első törvényt.
- Egy robotnak meg kell védenie saját létét, feltéve, hogy az első két törvényt nem sértik meg.

Fix robot
Robotok lehetnek fix robotok vagy mobil robotok. A mobil robotok olyan mobil alapú robotok, amelyek a robotot szabadon mozogják a környezetben. Az egyik fejlett mobil robot a Vonalkövető robot. Alapvetően egy robotról van szó, amely egy adott utat vagy pályát követ, és eldönti a saját magatartását, amely kölcsönhatásba lép az akadályokkal. Az útvonal lehet fekete vonal a fehér padlón (látható) vagy mágneses mező (láthatatlan). Alkalmazásai az alapvető háztartási felhasználásoktól az ipari felhasználásokig stb. Kezdődnek. Az iparban jelenleg az a helyzet, hogy a csomagokat vagy anyagokat a darurendszerrel szállítják egyik helyről a másikra. Időnként a nagy súlyok megemelése az emelőanyagok törését okozhatja, és a csomagokat is károsíthatja. A robotokat követő vonalat a gyermekek bevitelére használják bevásárlóközpontokban, otthonokban, szórakozóhelyeken, iparágakon keresztül. A vonalkövetés használata robot jármű az ipar egyik helyről a másikra szállítja az anyagokat. Ez a robotmozgás teljesen a pályától függ. A robot bármit megtehet, amire beállítja őket. A gyárakhoz hasonlóan csak a robot elkészítése a gyártmányuk.

Egy mobil robot
Vonalkövető robot
A vonalkövető robot egy olyan robot, amely egy bizonyos utat követ, amelyet egy visszacsatolási mechanizmus vezérel.
Egy alapkövető robot építése:
Az alapkövető robot felépítése a következő lépéseket tartalmazza.
- A robot mechanikus részének vagy testének megtervezése
- A robotok kinematikájának meghatározása
- A robot vezérlésének megtervezése

Vonalkövető robot
A robot mechanikus része vagy teste megtervezhető az AutoCAD vagy a Workspace segítségével. A Basic Line követő robot állhat egy alapból, amelynek két végén a kerekek vannak felszerelve. Téglalap alakú kemény műanyag lap használható alapként. Ezenkívül egy merev test, mint egy henger, hozzáadható más alakú testekhez, amelyek összekapcsolódnak egymással kötésekkel, és mindegyikük meghatározott irányú mozgással rendelkezik. A Vonalkövető robot lehet kerekes mozgatható robot rögzített talppal, egy lábú mobil robot, több merev testtel, amelyeket ízületek kötnek össze.
A következő lépés magában foglalja a robot kinematikájának meghatározását. A robot kinematikai elemzése magában foglalja mozgásának leírását egy rögzített koordinátarendszerhez képest. Főleg a robot mozgásával, és az egyes testek mozgásával foglalkozik egy lábú robot esetén. Ez általában magában foglalja a robot mozgásának dinamikáját. A robot teljes pályáját a Kinematikai elemzés segítségével állítjuk be. Ez a Workspace szoftver segítségével történhet.
A robot irányítása a működés legfontosabb szempontja. Itt a vezérlés kifejezés a robot mozgásvezérlésére utal, vagyis a kerekek mozgásának vezérlésére. Az alapvonalkövető robot bizonyos utat követ, és a robot ezen az úton haladó mozgását a két motor tengelyére helyezett kerekek forgatásának vezérlésével vezérlik. Tehát az alapszabályozást a motorok vezérlésével érjük el. A vezérlő áramkör szenzorok használatával érinti az utat és a mikrovezérlő vagy bármely más eszköz, amely a szenzor kimenete alapján vezérli a motor működését a motorvezérlőkön keresztül.
A vonalkövető robot irányításának 2 módja
- Mikrokontrollerek használata nélkül

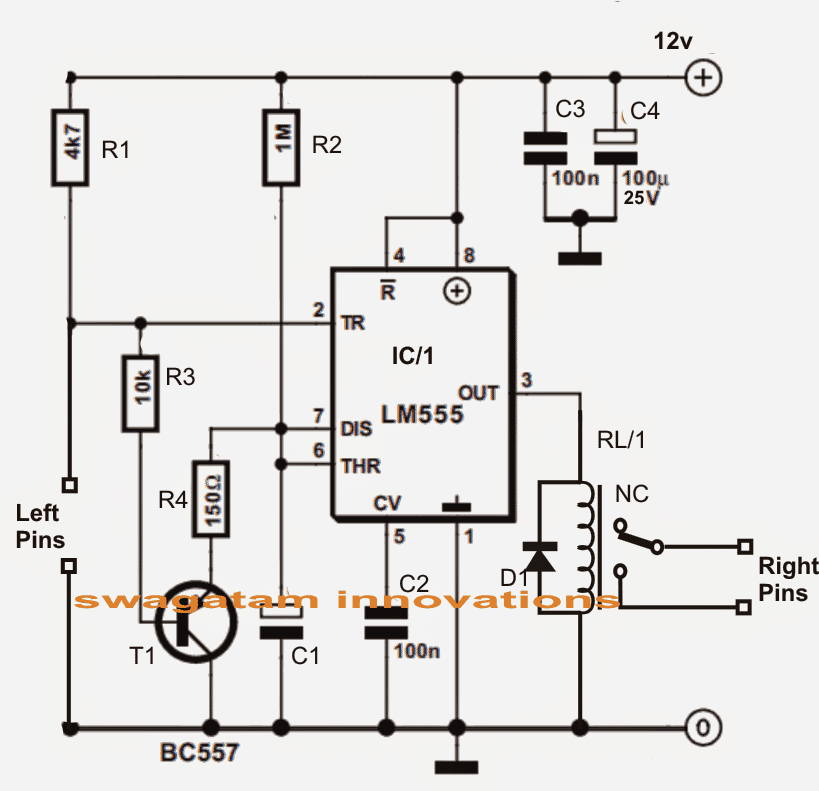
A vezérlőrendszer blokkvázlata
Ez egy IR-LED és fotodióda elrendezésből áll minden motor számára, amelyet a tranzisztor be- és kikapcsolása vezérel.
Az IR LED a megfelelő torzítással infravörös fényt bocsát ki. Ez az IR fény fehér felület esetén visszaverődik, és a visszavert IR fény beesik a fotodiódára. A fotodióda ellenállása csökken, ami a rajta keresztüli áram növekedéséhez és ezáltal a feszültség csökkenéséhez vezet. A fotodióda a tranzisztor aljához van csatlakoztatva, és a fotodióda keresztmetszetén megnövekedett feszültség következtében a tranzisztor vezetni kezd, és így a tranzisztor kollektorához kapcsolt motor elegendő ellátást kap a forgás megkezdéséhez. Ha az érzékelőelrendezés egyik útján fekete szín jelenik meg, az infravörös fény nem tükröződik, és a fotodióda nagyobb ellenállást mutat, ami miatt a tranzisztor leállítja a vezetést, és végül a motor forog.
Így az egész rendszer vezérelhető egy egyszerű LED-fotodióda-tranzisztor elrendezéssel.
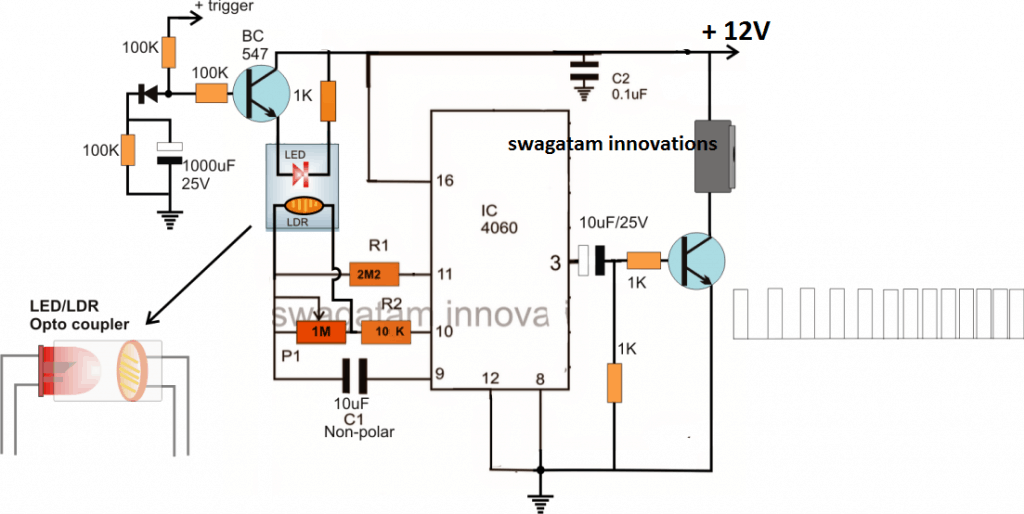
- Mikrokontrollerek használatával
Működési elv:
A zsinórba eső robot az önműködő robotok egyike. Ez észleli és eldobja a területre húzott vonalat. A vonalat egy blokk felületén fehér vonal vagy a fehér felületen a blokk vonal jelöli. Ennek a rendszernek értelemmel kell lennie. Ez az alkalmazás az érzékelőktől függ. Itt két érzékelőt használunk útvonal-felismerés céljából. Ez a közelségérzékelő és az IR-érzékelő. Az útfelismeréshez használt közelség-érzékelő és az akadályok felismerésére használt IR-érzékelő. Ezek az érzékelők a robot elejére szereltek. A mikrovezérlő intelligens eszköz, az egész áramkört a mikrovezérlő vezérli.

A robot járművet mikrovezérlővel követő vonal blokkdiagramja
Különböző típusú vezetékes robot járművek:
Kétféle vezetékes robotjármű létezik
- Mobil alapú vezetékes robot jármű
- RF alapú vezetékes robot jármű
A vonalkövető robot alkalmazásai:
- Ipari alkalmazások : Ezek a robotok automatizált eszközhordozóként használhatók a hagyományos szállítószalagok helyettesítésére szolgáló iparágakban.
- Autóalkalmazások : Ezeket a robotokat másként is lehet használni automata autók beágyazott mágnesekkel utakon fut.
- Hazai alkalmazások : Ezeket otthoni célokra is fel lehet használni, például padlótisztítás stb.
- Útmutató alkalmazások : Ezeket nyilvános helyeken, például bevásárlóközpontokban, múzeumokban stb. Lehet használni útvonaltervezés céljából.
Előnyök:
- A robot mozgása automatikus
- Hosszú távú alkalmazásokhoz használják
- Az építés egyszerűsége
- Illessze és felejtse el a rendszert
- Használt otthoni, ipari automatizálásban stb.