A bejegyzés egy egyszerű akadályt ismertet, amely elkerüli a robot áramkört mikrovezérlő nélkül és speciális motorvezérlő áramkörök vagy IC-k használata nélkül. Az ötletet Faiyyaz úr kérte
A dizájn
Alapvetően a formájában van mozgó jármű amely képes észlelni és elkerülni az útjában lévő lehetséges akadályokat, és megfelelően megváltoztatni az irányát, hogy mozgása megszakítás nélküli, egyszerű maradjon!
A művelet tehát automatikus, kézi vagy emberi beavatkozás nélkül.
A mikrovezérlő nélküli robot elkerülését akadályozó akadályok bemutatott elképzelése, amint a neve is sugallja, nem alkalmaz mikrovezérlőt, ezért rendkívül egyszerűen felépíthető és alkalmas minden új hobbi számára.
Az áramkör megtervezése közben rájöttem, hogy az elv megvalósításához legalább néhány akadályérzékelő modulra lesz szükség, mert egyetlen modul használata a motor rendellenes mozgását okozhatja, és nem segíthet a jármű zökkenőmentes elterelésében vagy elfordulásában. szabad utat.
A jármű motorja meglehetősen hasonló a motorhoz távirányítós játékautó amelyet az egyik korábbi bejegyzésben tárgyaltam.
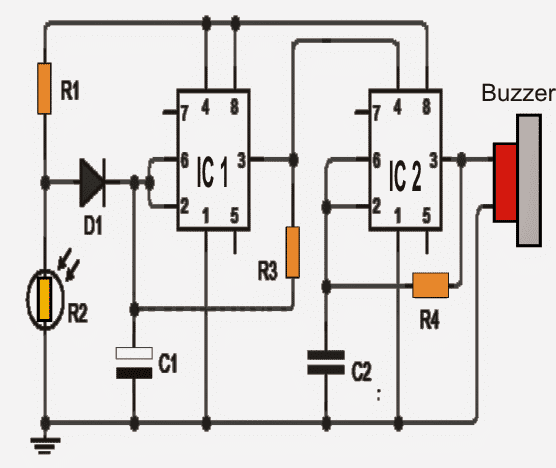
Az alábbi ábra a rendszer egyik modulját ábrázolja, ezért két vagy pár ilyen modulra lenne szükség a jármű jobb és bal oldalán.
Az ötlet egyszerű, mikrokontroller és speciális motorvezérlő IC-k nélkül működik. Ez azt jelenti, hogy bármilyen kódolás és bármilyen komplex motorvezérlő IC használata nélkül elkészítheti ... és az áramkör lehetővé teszi, hogy bármilyen egyenáramú motort használjon teljesítményétől függetlenül, így akár a nagy teljesítményű akadályokat is elkerülhető járművek elkerülhetők ennek az áramkörnek a segítségével készülnek, amelyeket általában bevásárlóközpontokban és hasonló kiskereskedelmi üzletekben használnak.
Kördiagramm

Most próbáljuk megérteni a fenti áramkört a következő magyarázat segítségével:
Hogyan működik
Az IC 555 infravörös adóként van konfigurálva, és állandó 38 kHz frekvenciát állít elő, míg a szomszédos tranzisztoros áramkör vevő fokozatként vagy IR érzékelő fokozatként van konfigurálva.
Tegyük fel, hogy ez a jobb oldali modul, és tegyük fel, hogy véletlenül ez a modul észleli az akadályt az útvonalon.
Ezért amint akadályt észlel, az 555 IC által generált 38 kHz frekvencia visszaverődik a szomszédos vevő áramkör érzékelője felé.
A vevő azonnal aktiválja a kapcsolódó tranzisztorokat, így a végső meghajtó tranzisztor vezetését gátolják.
Az a tranzisztor által vezérelt motor állítólag a jármű bal oldalán, vagyis ennek a modullal szemben helyezkedik el ... hasonlóképpen a jobb oldalon található motort ténylegesen a bal oldali modul vezérli .
Következésképpen, amikor a fenti feltételezett jobb oldali akadályérzékelő modul aktiválódik, leállítja a bal oldali motort, miközben a jobb oldali motor normálisan mozog.
Ez a helyzet azt eredményezi, hogy a járművet bal oldali eltérítésre kényszerítik ... ami azt jelenti, hogy a feltételezett bal modul most még erősebb akadályjeleket kap, és folyamatosan arra kényszeríti a járművet, hogy erősebben haladjon a folyamatban lévő eltérítés során, amíg az akadályt teljesen elkerüli . A modul most már nem veszi fel az akadályjeleket, és a jármű normálisan halad előre az új útvonalon.
Amíg a fenti eltérítést végrehajtják, a bal oldali modul kénytelen egyre jobban elszigetelődni és eltávolodni az akadálytól, hogy ez ne adjon alkalmat a beavatkozásba, és lehetővé tegye a jármű tiszta és zökkenőmentes elterelését.
Pontosan ugyanazokat az eljárásokat alkalmazzák abban az esetben, ha a bal oldali modul észleli az akadályt a jobb oldali modul előtt, ahol a jármű kénytelen egyre erősebben haladni a jobb oldal felé.
Láthatunk egy 'letiltó' áramkört is a modulban, amelyek összekapcsolódnak a bal és a jobb oldali modulon. Ezt a szakaszt szándékosan vezetjük be annak biztosítására, hogy mindkét modult soha ne aktiválják együtt.
Ezért például, ha a bal oldali modul elsőként észlel akadályt, azonnal letiltja a jobb oldali modult, és elindítja a jármű elterelését jobbra és fordítva.
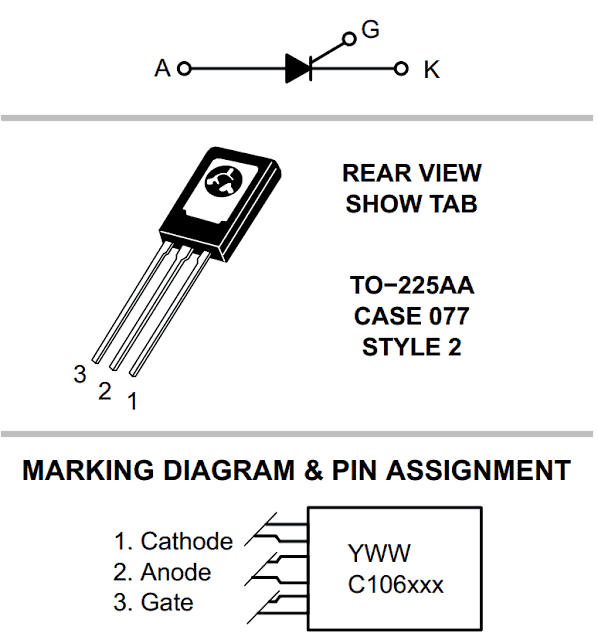
Az érzékelő IC lehet egy szabványos TSOP17XX sorozat
További információ a fenti érzékelő IC-vel kapcsolatban megtanulható hogyan lehet csatlakoztatni a TSOP1738 IC-t
A motort pedig felszerelni kell sebességváltókkal, hogy a mozgás eredetileg ellenőrzött szinten maradjon.
Kerék beállítása
A bal és a jobb modul teljes felállítását és a kapcsolódó elektromos csatlakozásokat az alábbi ábra szemlélteti:

Frissítés
Kicsit elgondolkodva elmondja, hogy a fenti egyszerű akadálykerülő robot-áramkör megvalósítása a kettő helyett egyetlen modul használatával is megvalósítható.
Azonban egyetlen modul lehetővé teszi a jármű számára, hogy minden akadályt észlelve minden oldalról egyirányú terelést hajtson végre, ezért a rendszer konfigurálható úgy, hogy az óramutató járásával megegyező vagy az óramutató járásával ellentétes irányba tereljen, attól függően, hogy melyik motor kapcsolódik az áramkörhöz a műveletekhez.
A beállított példa a következő képen jeleníthető meg:

Úgy tűnik azonban, hogy van egy probléma a fenti egyetlen motor beállításával. Ha feltételezzük, hogy a jármű bal oldali derékszögű sarokkal találkozik. Ez arra kényszeríti a járművet, hogy az óramutató járásával ellentétes irányban mozogjon, amíg be nem fordul egy U-kanyarban, és visszafelé kezd elindulni ugyanabba az irányba, ahonnan elindult. A felhasználó ezt nem értékelné.
Előző: SMD-ellenállások - Bevezetés és munka Következő: Hogyan működik egy gyorsulásmérő?